

A hinged robot joint
A robot joint and hinge technology, applied in the field of robotics, can solve problems such as bloated wrist joint structure, large volume, and complex structure, and achieve the effects of small transmission viscous resistance, simplified joint structure, and low control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
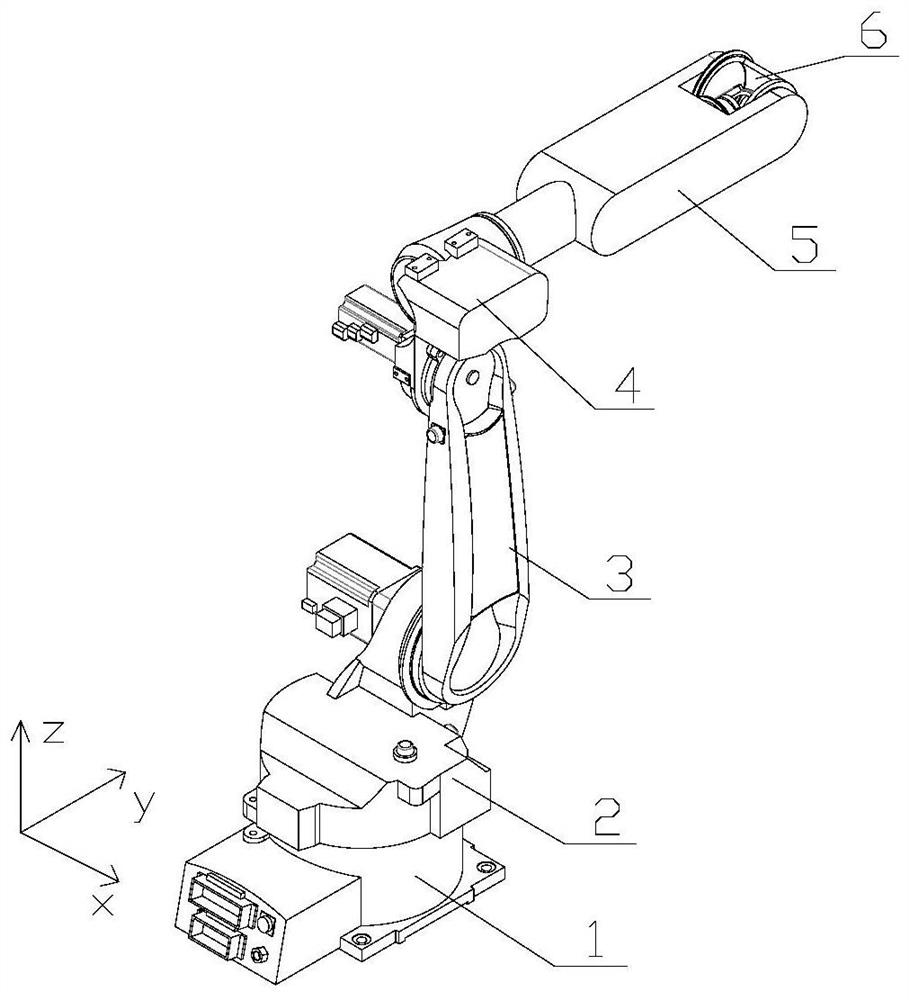
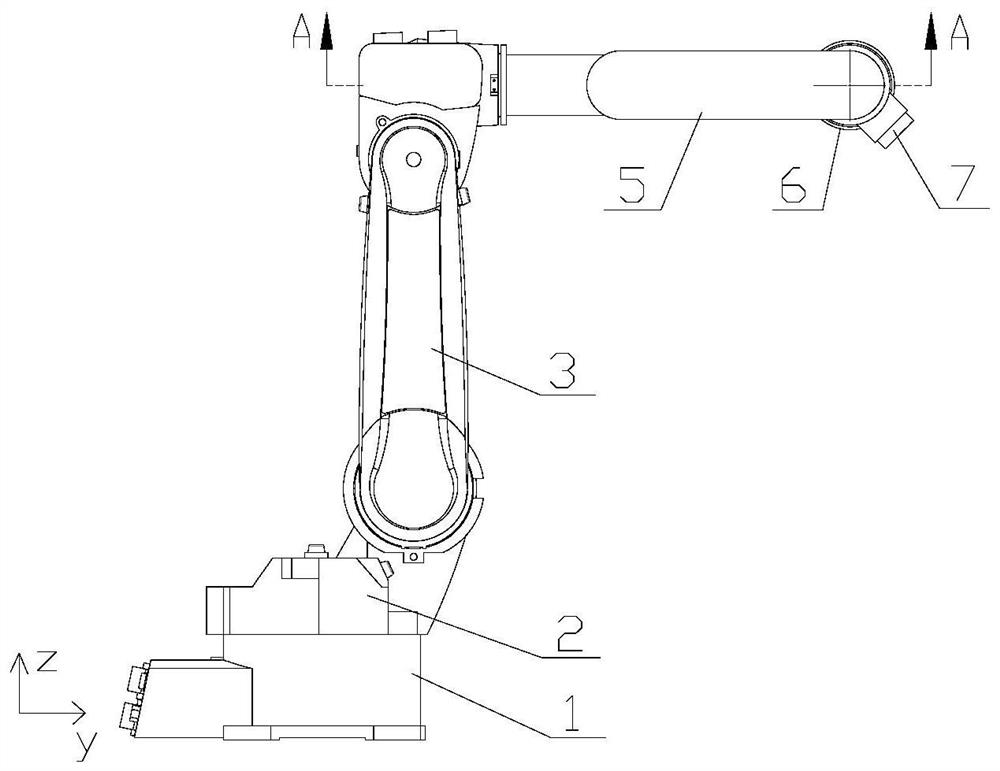
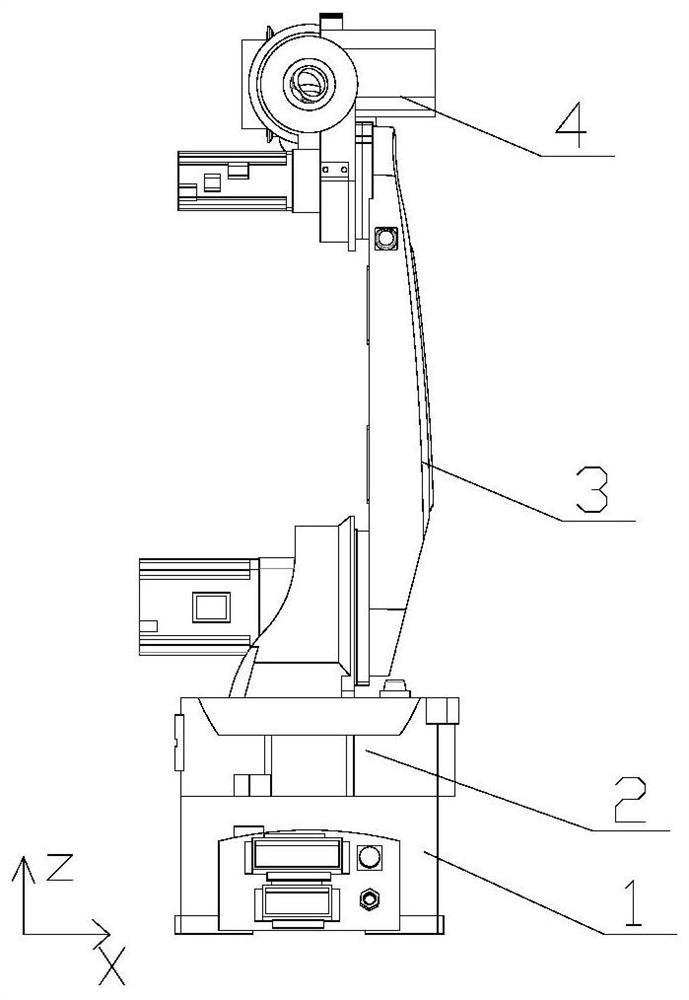
[0024] like Figure 1-4 As shown, a hinged robot joint provided by the present invention includes a base 1, a waist seat 2, a large arm 3, a three-axis drive assembly 4, a small arm 5, a wrist shaft assembly 6 and an end flange 7, wherein the waist seat 2 It is arranged on the base 1 and is rotatably connected with the base 1, one end of the big arm 3 is rotatably connected with the waist seat 2, the other end is rotatably connected with the three-axis drive assembly 4, and one end of the small arm 5 is rotatably connected with the three-axis drive assembly 4, The other end is rotatably connected with the wrist shaft assembly 6, the end flange 7 is rotatably connected with the wrist shaft assembly 6, and is hinged with the forearm 5, and the tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More