

Pseudo point cloud data generation method of laser radar
A lidar and cloud data technology, applied in image data processing, instruments, 3D modeling, etc., can solve the problems of inaccuracy, coarse granularity of point cloud data in time and space, and low scanning frequency of lidar, so as to improve The effect of granularity and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
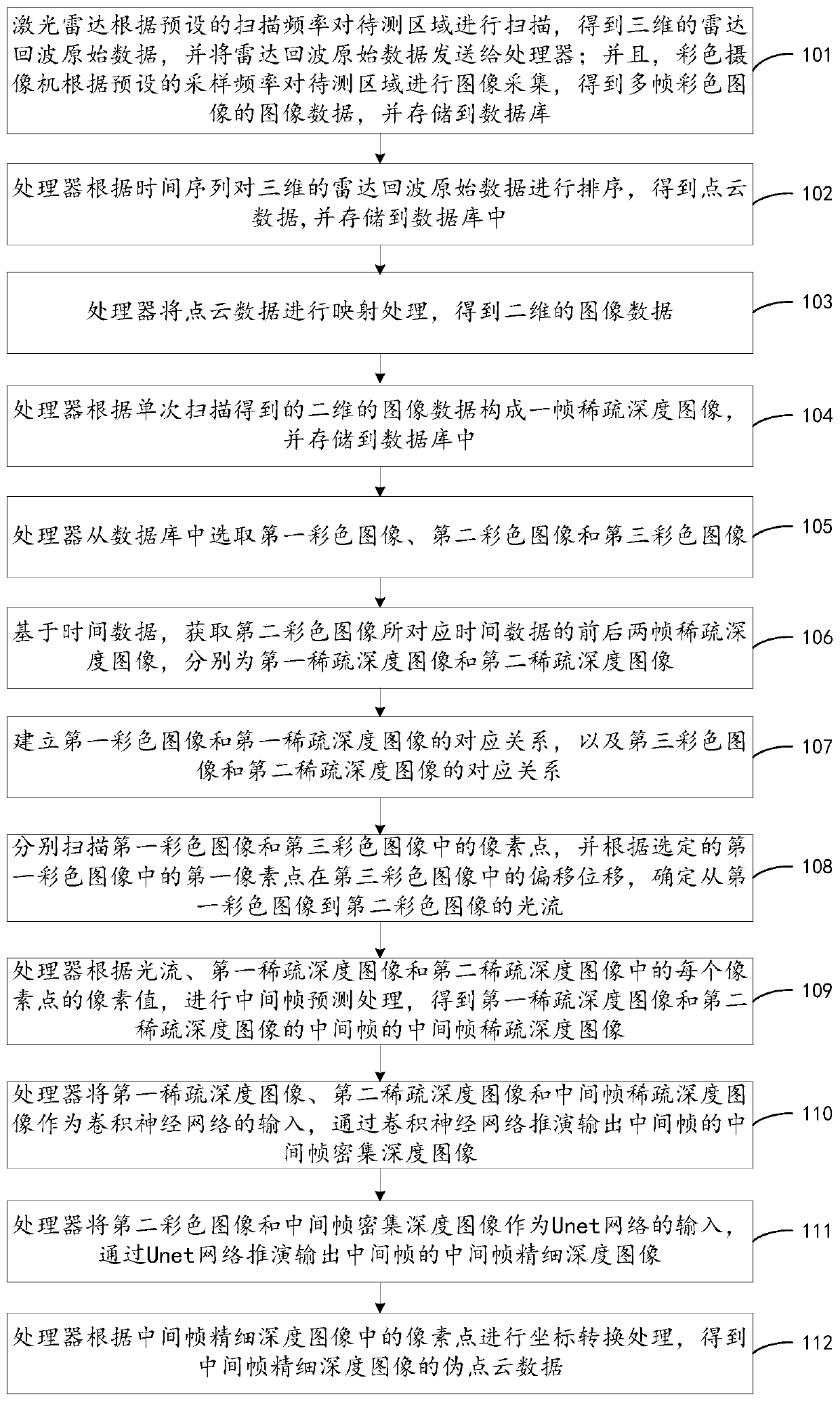
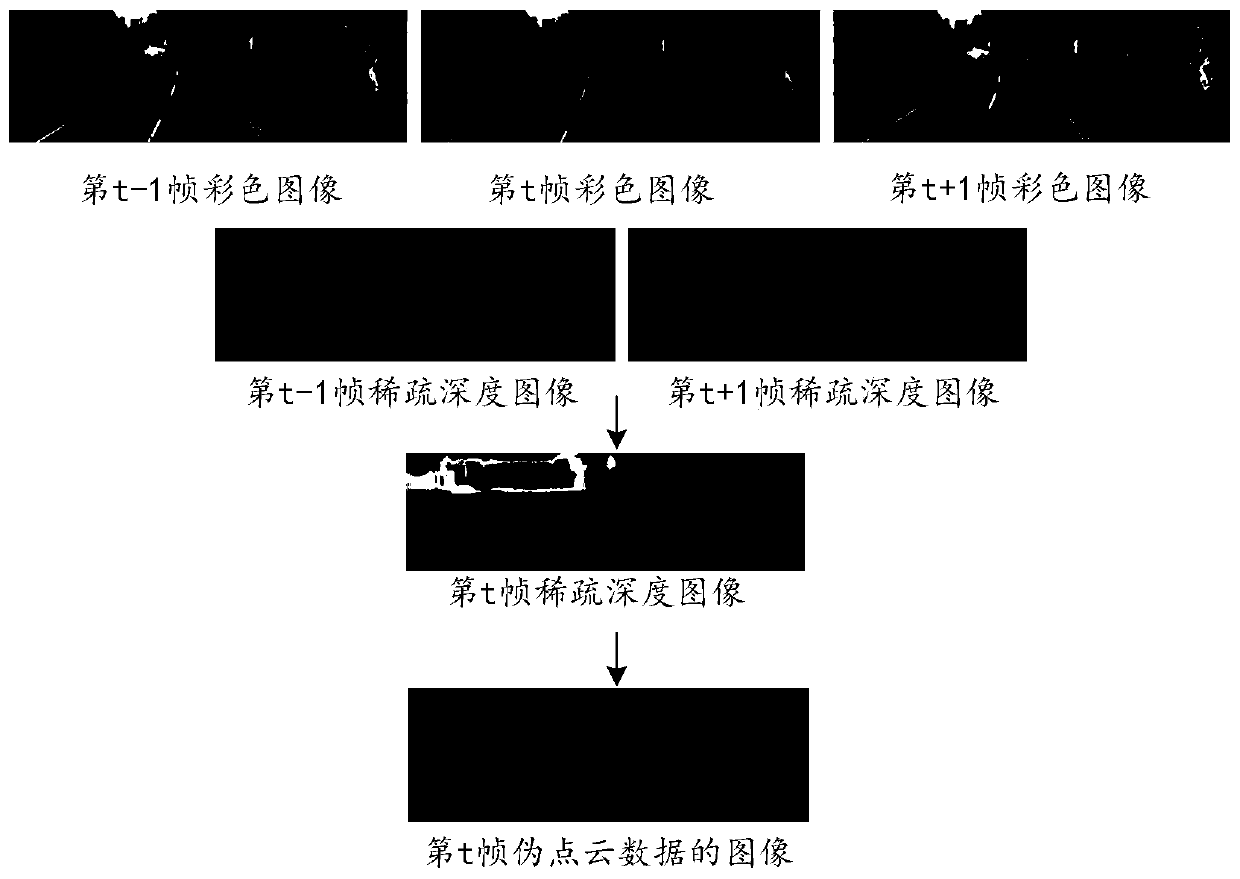
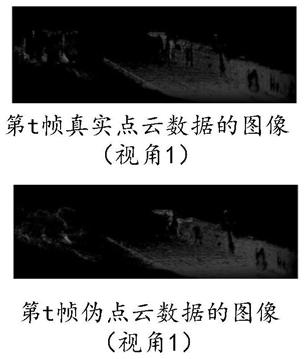
[0037] The pseudo point cloud data generation method of lidar provided by the present invention uses the optical flow of the color image corresponding to the sparse depth map of two consecutive frames to replace the optical flow of the sparse depth map, and obtains the middle frame of the two consecutive frames by interpolation depth map, and further interpolation calculation can be performed based on the obtained intermediate frame and the previous or subsequent frame to obtain the depth map of the intermediate frame between them, so that higher scanning frequency can be obtained without changing the actual lidar scanning frequency The data obtained by frequency scanning improves the granularity and accuracy of point cloud data in time and space.
[0038] figure 1 The flow diagram of the pseudo point cloud data gener...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More