

Robot interface capable of rapidly changing end-effecter
A technology for end tools and robots, applied in the field of robots, can solve the problems of low reliability, complex interface, heavy weight, etc., and achieve the effects of high reliability, avoiding tool falling, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
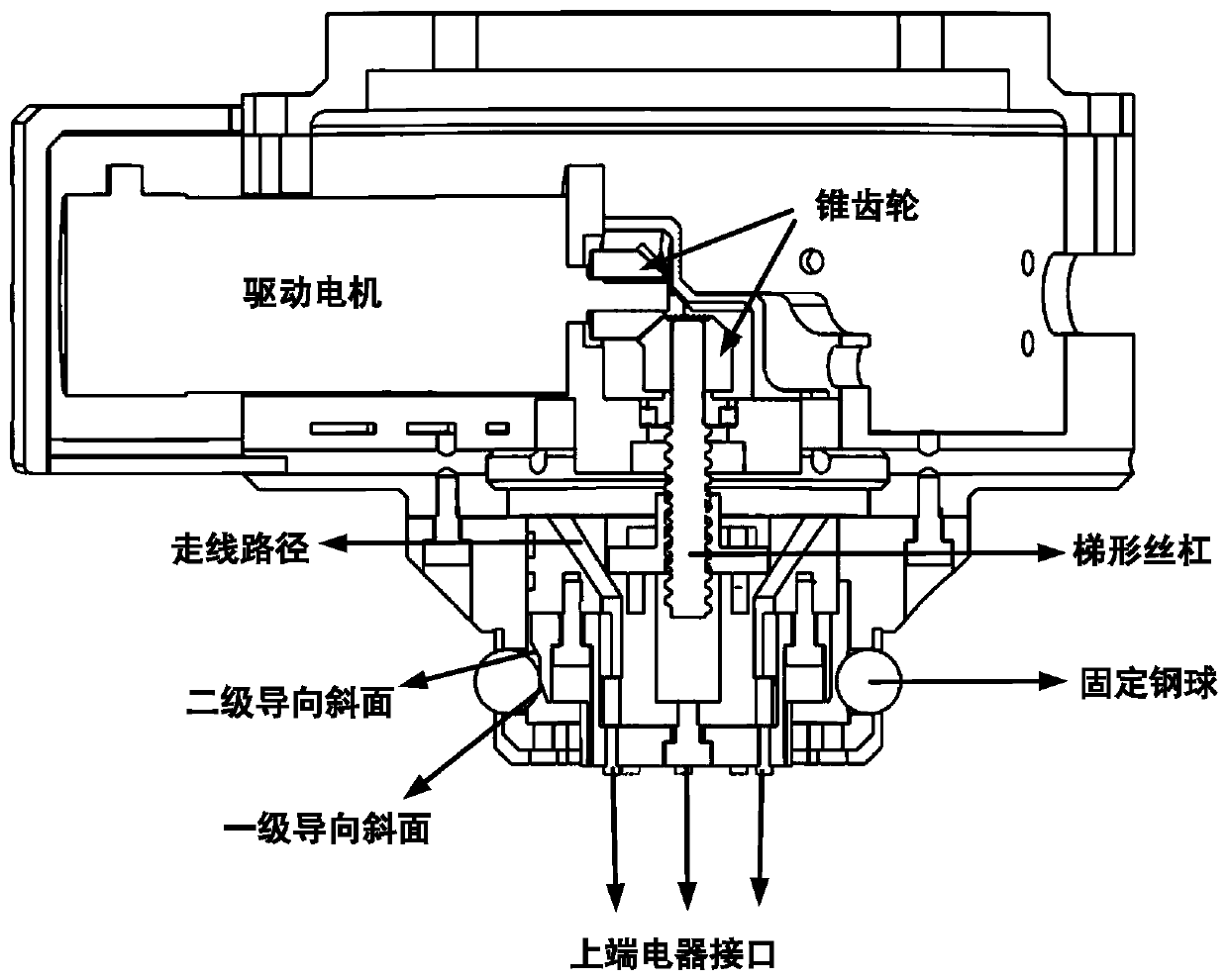
[0032] This embodiment provides an interface structure of a rapidly replaceable end tool for a robot, including a robot end interface and a tool end interface.
[0033] Such as figure 1 As shown, the robot end interface includes a driving device, a transmission device, a first locking mechanism, and a first electrical interface.
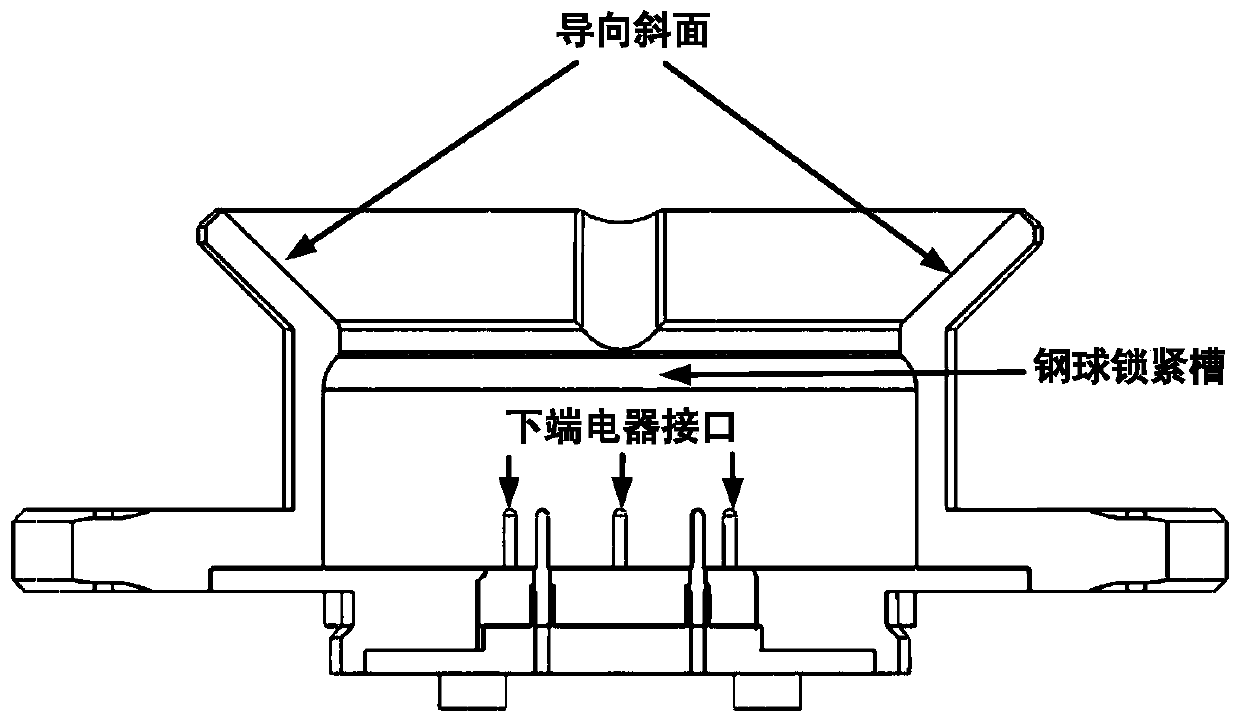
[0034] Such as figure 2 As shown, the tool end interface includes a second locking mechanism and a second electrical interface.
[0035] The driving device can drive the first locking mechanism through the transmission device, so that the first locking mechanism and the second locking mechanism form a mechanical lock first, and then the first electrical interface and the second locking mechanism The second electrical interface forms an electrical connection.
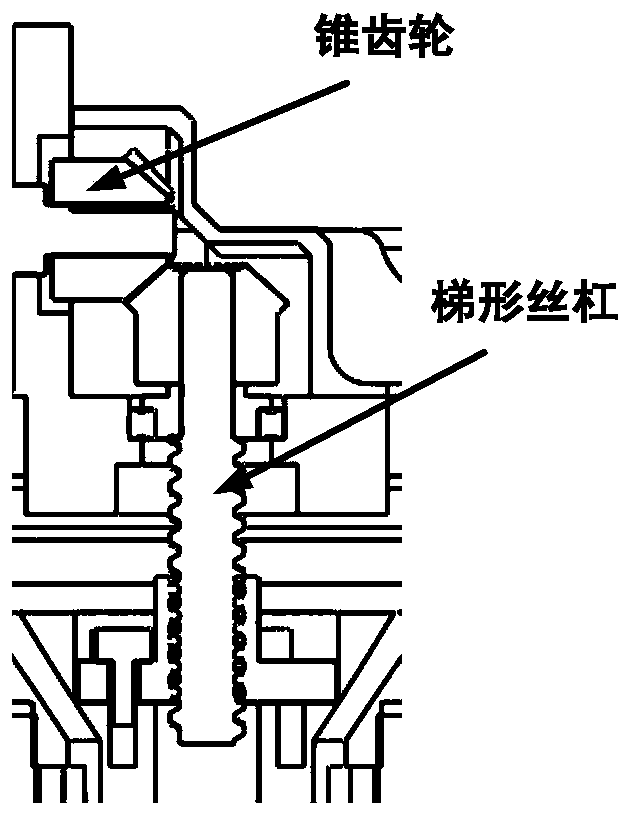
[0036] In a preferred embodiment, the driving device includes a driving motor; the transmission device includes a trapezoidal screw, and the trapezoidal screw has a self-locking function. ...
Embodiment 2
[0050] This embodiment provides a dual-arm robot, including a dual-arm with an end and an end tool, and the end of the double arm can be docked with the end tool, and there is a device according to any one of Embodiment 1 of the present invention between the end and the end tool. The robot can quickly replace the interface structure of the end tool.
[0051] Compared with the prior art, it can be seen that the existing interfaces are all driven by discrete driving devices, and the system is complicated, resulting in large volume, heavy weight and low reliability of the interface, which cannot meet the requirements of robot astronauts. The invention only uses one motor to complete the mechanical and electrical connection, avoids completing the electrical connection in an unlocked state by separating the guide surface, and increases the reliability of the device.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More