Robot autonomous path planning method
A path planning and robotics technology, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the problems of reducing the operating efficiency of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
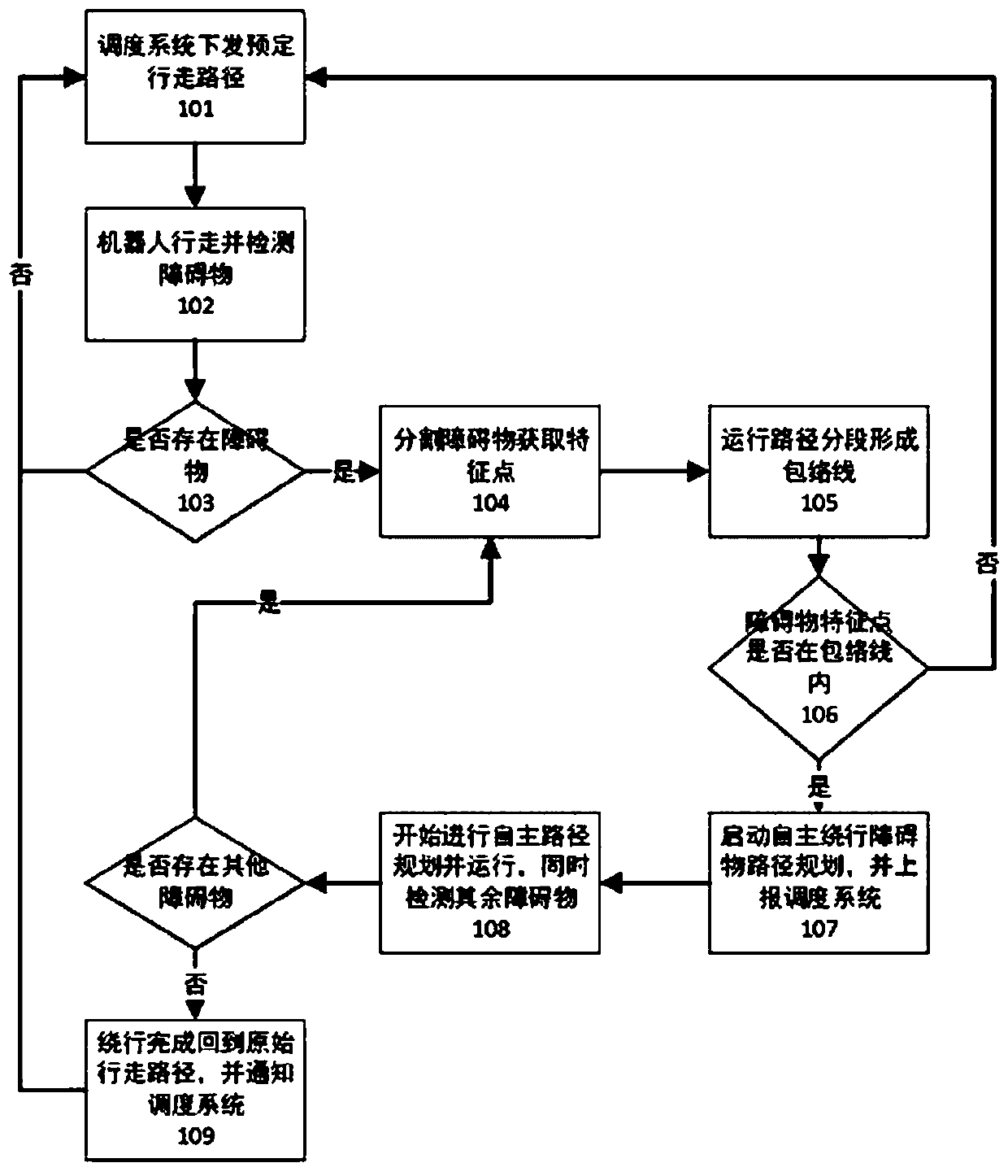
[0079] The robot performs autonomous path planning logic such as figure 1 The process described in the implementation steps is completed; the path planning method for the robot to autonomously circumvent obstacles in the present invention is suitable for robot control in various driving modes, such as: differential structure mobile robot, rudder wheel structure mobile robot, microphone Ram wheel structure mobile robot, crawler structure mobile robot, axle structure mobile robot.
[0080] Step 101, the robot runs according to the predetermined walking path under the scheduling system, and obtains the coordinate position of the robot in the map in real time; that is, the robot obtains the sequence of future walking paths from the scheduling system, and performs path matching according to the map system stored by the robot.
[0081] Step 102, during normal walking, the robot calculates the absolute coordinate position and heading angle of the robot in the map system through the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com