Laser navigation AGV high-precision positioning and target alignment control method
A laser navigation and control method technology, applied in vehicle position/route/height control, two-dimensional position/course control, control/adjustment system, etc., can solve problems such as poor stability, high cost, and poor precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
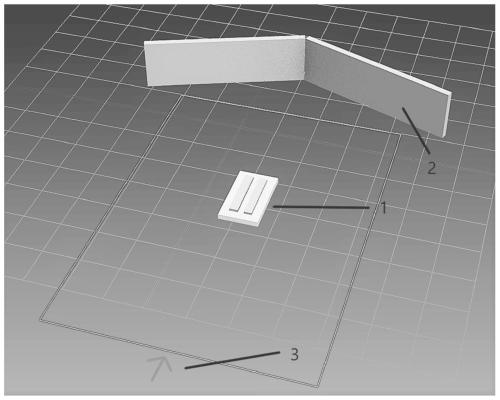
[0078] The present invention is aimed at the high-precision positioning and alignment control of AGV relative to the "target". According to different specific applications (such as shelf alignment, charging docking, etc.), the "target" can be different fixed objects or local environments. The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
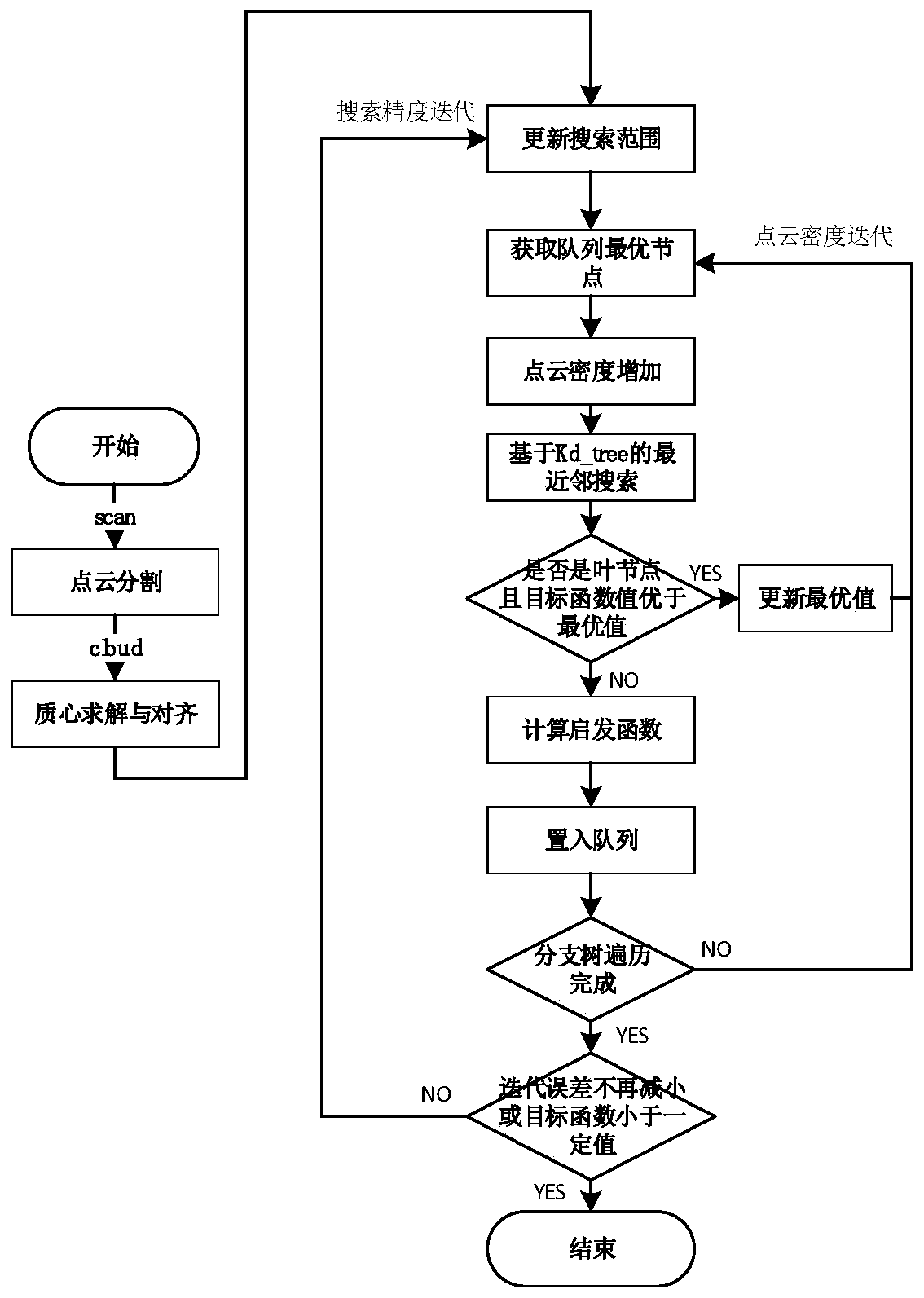
[0079] The content of "a laser navigation AGV high-precision positioning and target alignment control method" of the present invention includes the following four parts.
[0080] (1) Target point cloud segmentation and extraction
[0081] Segment and extract the "target" point cloud data obtained by the laser radar sensor, the main steps are as follows:
[0082] ① Perform voxel filtering on the laser point cloud data to reduce the number and scal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More