Garbage pickup robot based on visual semantic SLAM (simultaneous localization and mapping)
A technology of robots and robot ontology, applied in the field of intelligent robots, can solve problems such as inconvenient recycling, achieve the effect of improving efficiency and safety, overcoming singleness and inefficiency, and saving manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical means, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with the accompanying drawings.
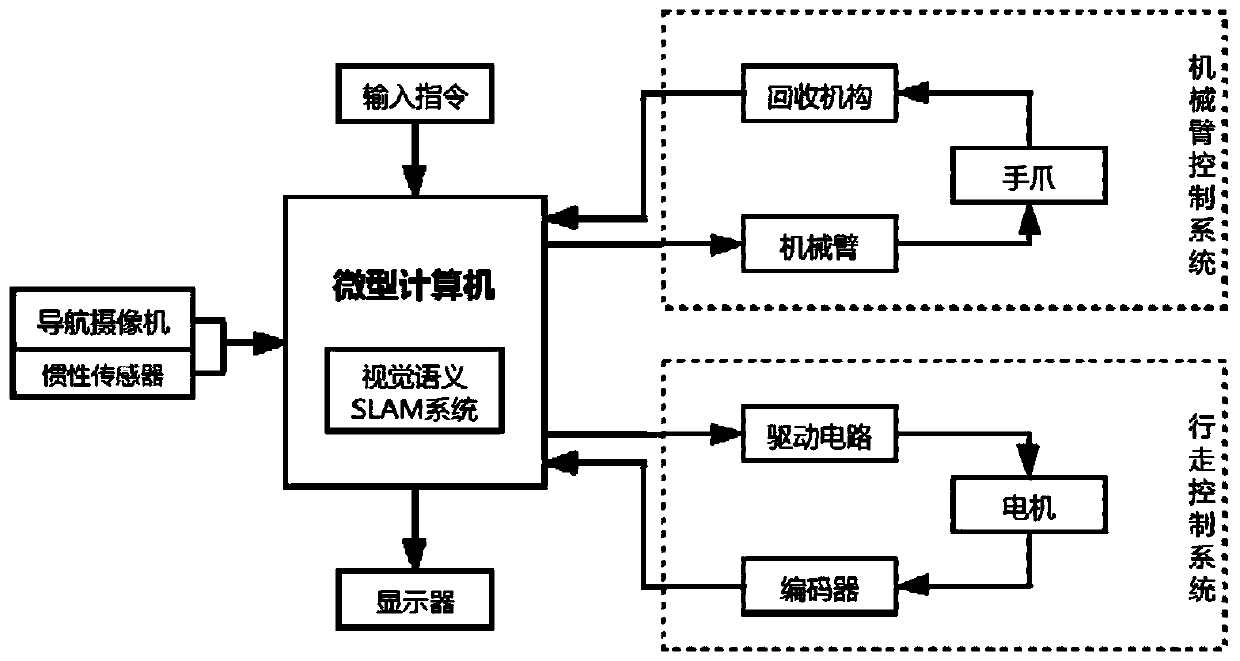
[0029] The garbage picking robot based on visual semantic SLAM disclosed in the present invention includes two parts: a robot body and a visual semantic SLAM control system.
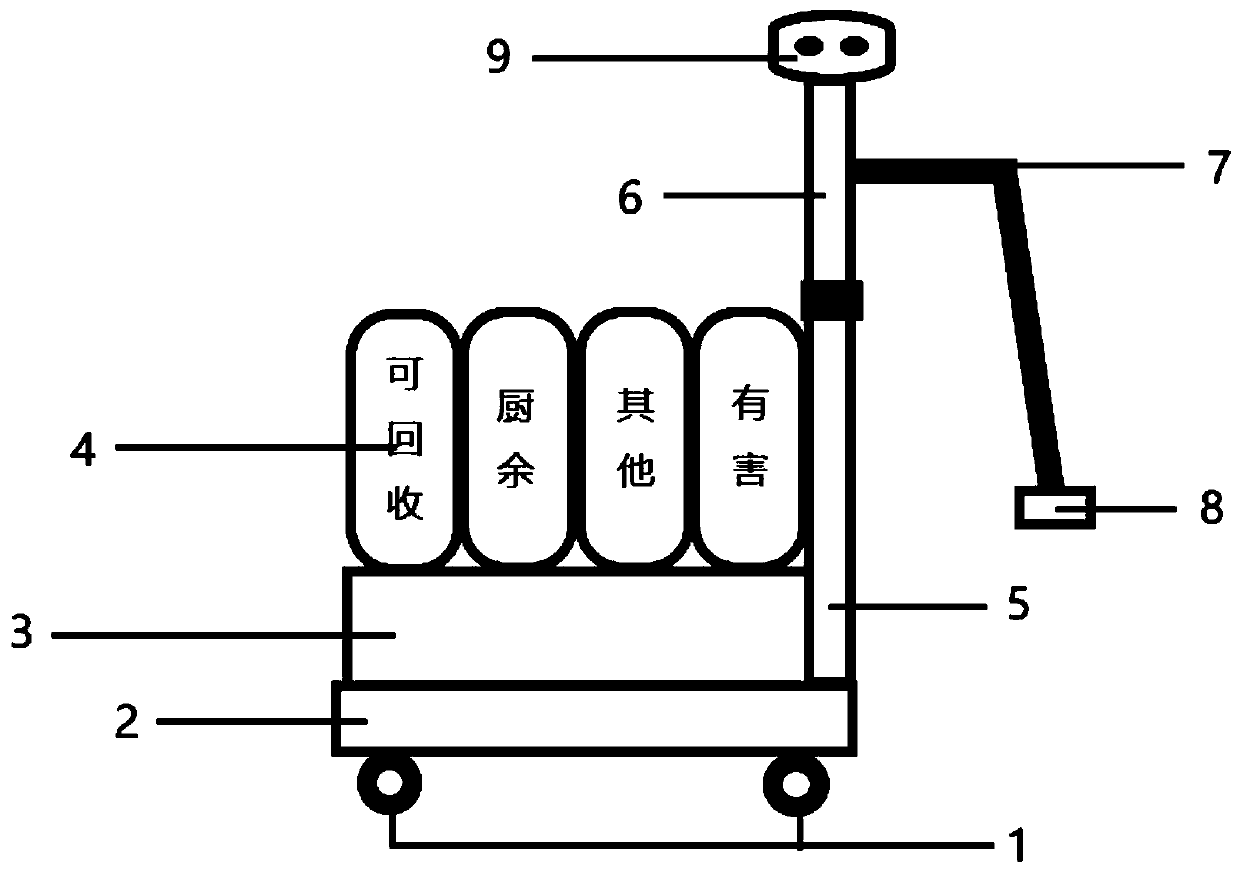
[0030] Its robot body is as figure 1As shown, it mainly includes a chassis (2), and the chassis (2) is also provided with a walking assembly 1 controlled by a microcomputer; an integrated warehouse (3) located on the top of the chassis (2), in which There are microcomputers, inertial measurement sensors, and a visual semantic SLAM system installed on the microcomputer; a garbage recycling mechanism (4) is set above the integrated warehouse (3), and the garbage recycling mechanism specifically includes recyclable garbage, hazardous garbage, kitchen waste, and other There are four parts o...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap