

Eel-like robot based on electromagnetic artificial muscle and its working method
A technology of artificial muscles and working methods, applied in the field of bionic machinery, can solve the problems of environmental interference, inflexibility, loud propeller noise, etc., and achieve the effects of stable backward swimming ability, long working time and high mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0039] The present invention will be described in detail below with reference to the accompanying drawings and examples.
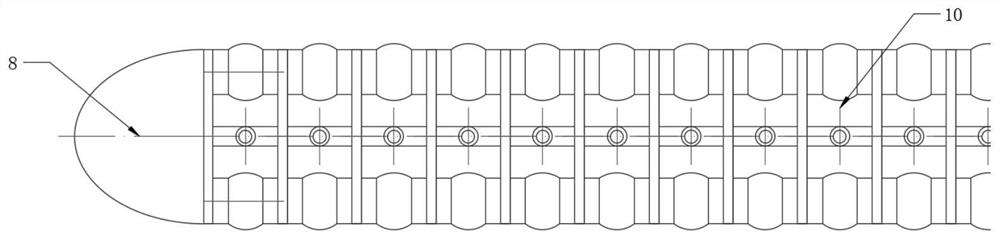
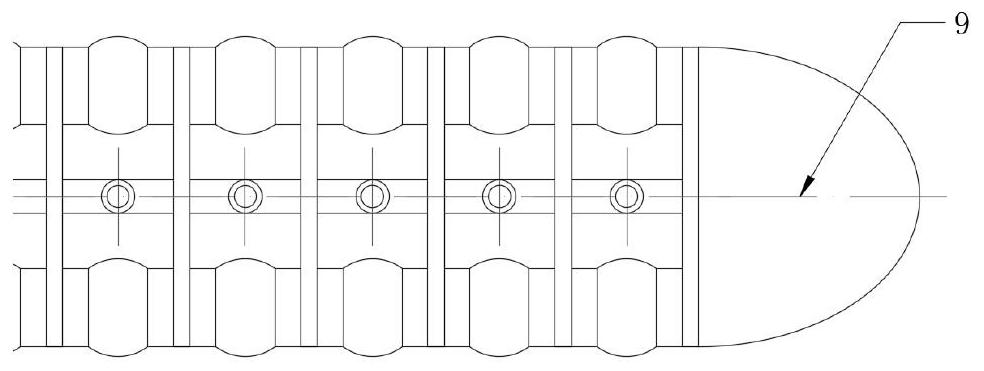
[0040] like Figure 1-Figure 9 As shown, the eel-like robot based on electromagnetic artificial muscles includes a robot head 8, a robot tail 9 and a robot skeleton 10 composed of several joints connected in series. The structures and functions of the robot head 8 and the robot tail 9 are exactly the same , symmetrically installed at both ends of the robot skeleton 10;
[0041]Each joint of the robot skeleton 10 includes a rear rib 1, a first right electromagnetic muscle 2, an anterior rib 3, an anterior spine 4, a pin shaft 5, a first left electromagnetic muscle 6 and a posterior spine 7, and the anterior rib 3 and the rear rib 1 are arranged oppositely, the first right electromagneti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More