

Obstacle removing robot and control method
A control method and robot technology, which is applied in the field of robots, can solve the problems of single function, reduce the efficiency of obstacle removal, and inability to accurately locate obstacles, etc., and achieve the effect of strong practicability and improved efficiency of obstacle removal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
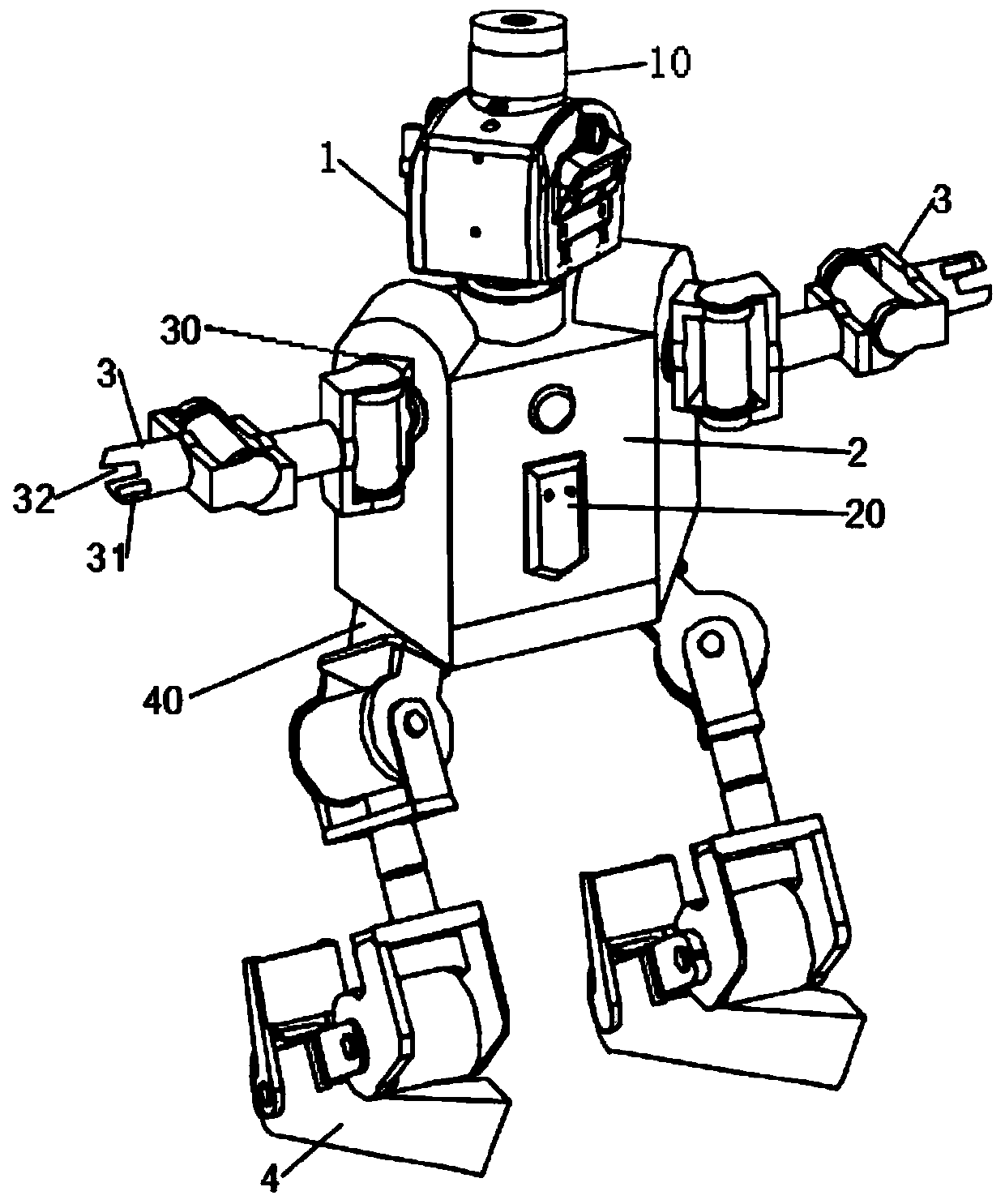
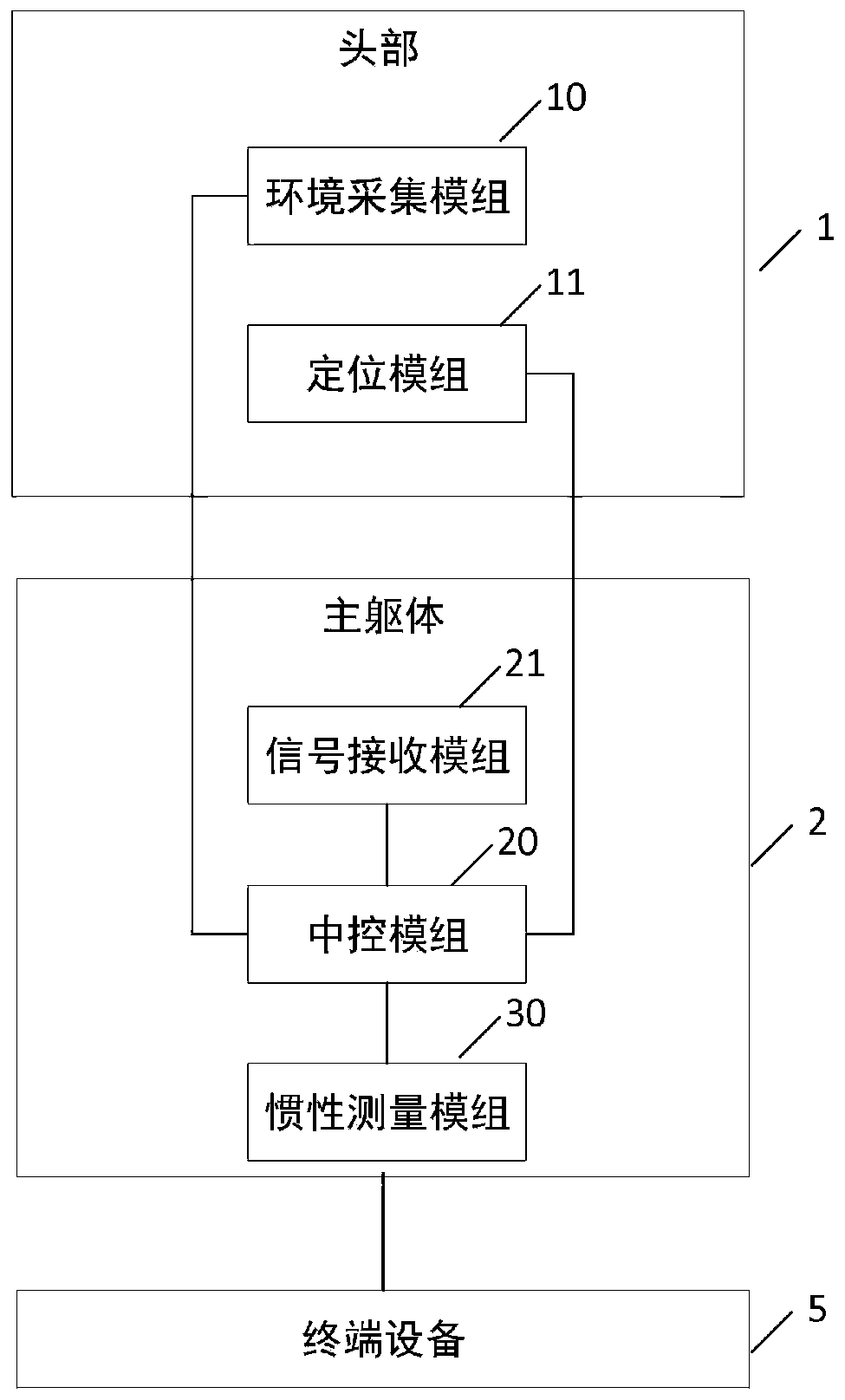
[0054] A head 1, the top and both sides of the head 1 are provided with an environmental collection module 10 for real-time collection of external environmental information;
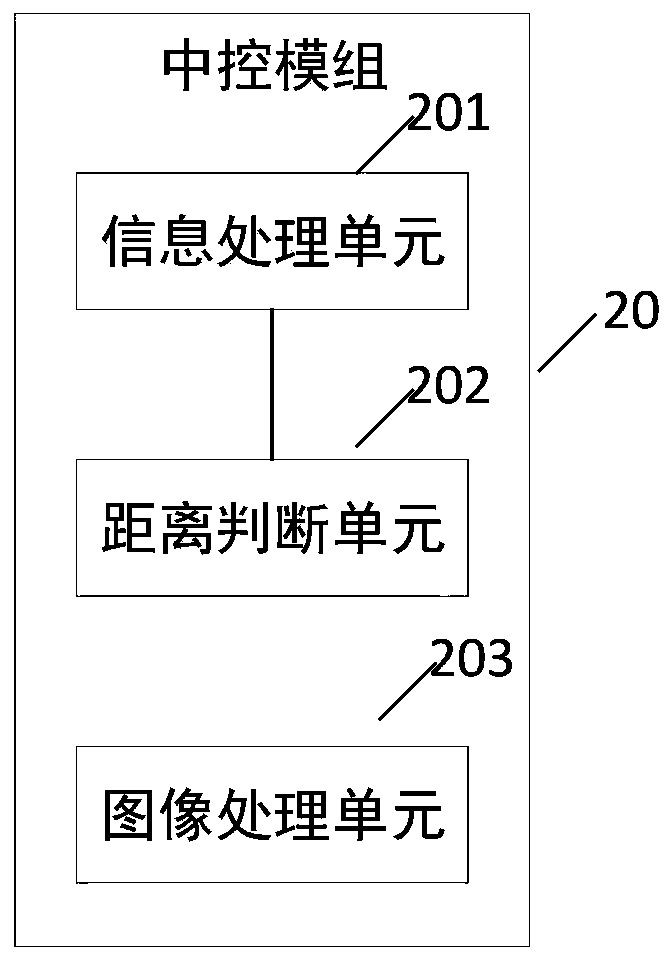
[0055] A main body 2, the main body 2 is arranged on the lower part of the head 1, a central control module 20 is arranged in the main body, the central control module 20 is connected to the environment collection module 10, the central control module 20 receives the environmental information, and according to The environment information judges whether there is an obstacle in the movement track of the obstacle removal robot, and outputs a control command when it is judged that there is the obstacle;
[0056]Two mechanical arms 3 are movably connected to the upper part of the main body 2 through a first connecting shaft 30, each mechanical arm 3 receives a control instruction, and rotates in a direction with obstacles according to the control instruction;
[0057] Two crawling limbs 4 are movably connecte...
Embodiment 2
[0074] In a preferred embodiment, as figure 1 As shown, a fixed interface 32 is provided at the end of each mechanical arm 3, and a clearing execution structure is fixed through the fixed interface 32. The clearing execution structure can be a support rod, or a mechanical claw or other obstacles that can be used to clear The mechanical structure of the object can be selected by the user according to the actual needs of the application scenario.
[0075] In this embodiment, the support bar or mechanical claw fixed on the fixed interface 32 can be a retractable structure, for example, a support bar is fixed at the fixed interface 32 at the end of the left mechanical arm of the obstacle removal robot for supporting At the same time, a mechanical claw is fixed at the fixed interface 32 at the end of the right mechanical arm of the obstacle-clearing robot, and the mechanical claw can hold various obstacle-clearing tools for clearing obstacles. Also for example, the fixed interface...
Embodiment 3
[0078] In a preferred embodiment, as figure 2 As shown, the front part of the main body 2 of the obstacle removal robot also includes a signal receiving module 21, the signal receiving module 21 is connected to the central control module 20, and the signal receiving module 21 is used to receive external remote control commands;
[0079] The central control module 20 receives the remote control command, and controls the two mechanical arms 3 to perform corresponding obstacle removal actions.
[0080] In this embodiment, for example, the remote control command can be controlled by the remote terminal device 5, for example, it can be a remote control device or a computer device. When the obstacle-clearing robot performs an obstacle-clearing task, the obstacle-clearing robot acts according to the instruction information provided by the user, and the central control module 20 can control the two mechanical arms 3 to perform corresponding obstacle-clearing actions. For example, in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More