

Fault diagnosis and fault-tolerant compensation algorithm for steer-by-wire motor and sensor
A technology of fault diagnosis and steer-by-wire, which is applied to steering mechanisms, electric steering mechanisms, power steering mechanisms, etc., and can solve the problem of inability to effectively and accurately determine which kind of fault occurs, cannot establish a corresponding fault-tolerant compensation algorithm, and cannot be effective and accurate Fault tolerance compensation and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
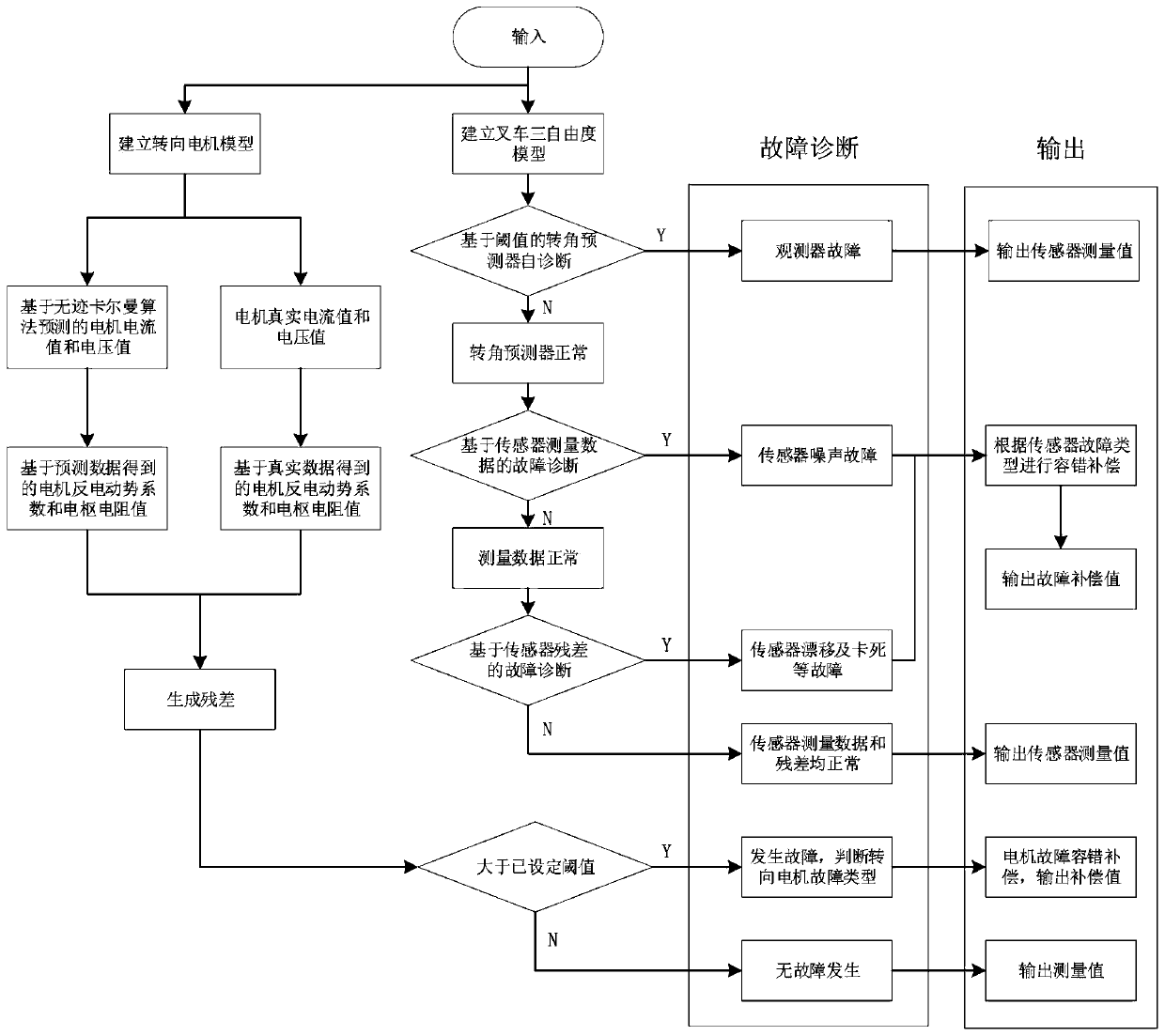
[0133] Such as figure 1 As shown, a fault diagnosis and fault-tolerant compensation algorithm for the steer-by-wire motor and sensor, the algorithm includes the following sequential steps:
[0134] (1) Establish the three-degree-of-freedom dynamic joint model of the steering mechanism and the electric forklift. On the basis of this model, design the seamless Kalman filter algorithm to design the corner predictor;
[0135] (2) Establish steering motor model;
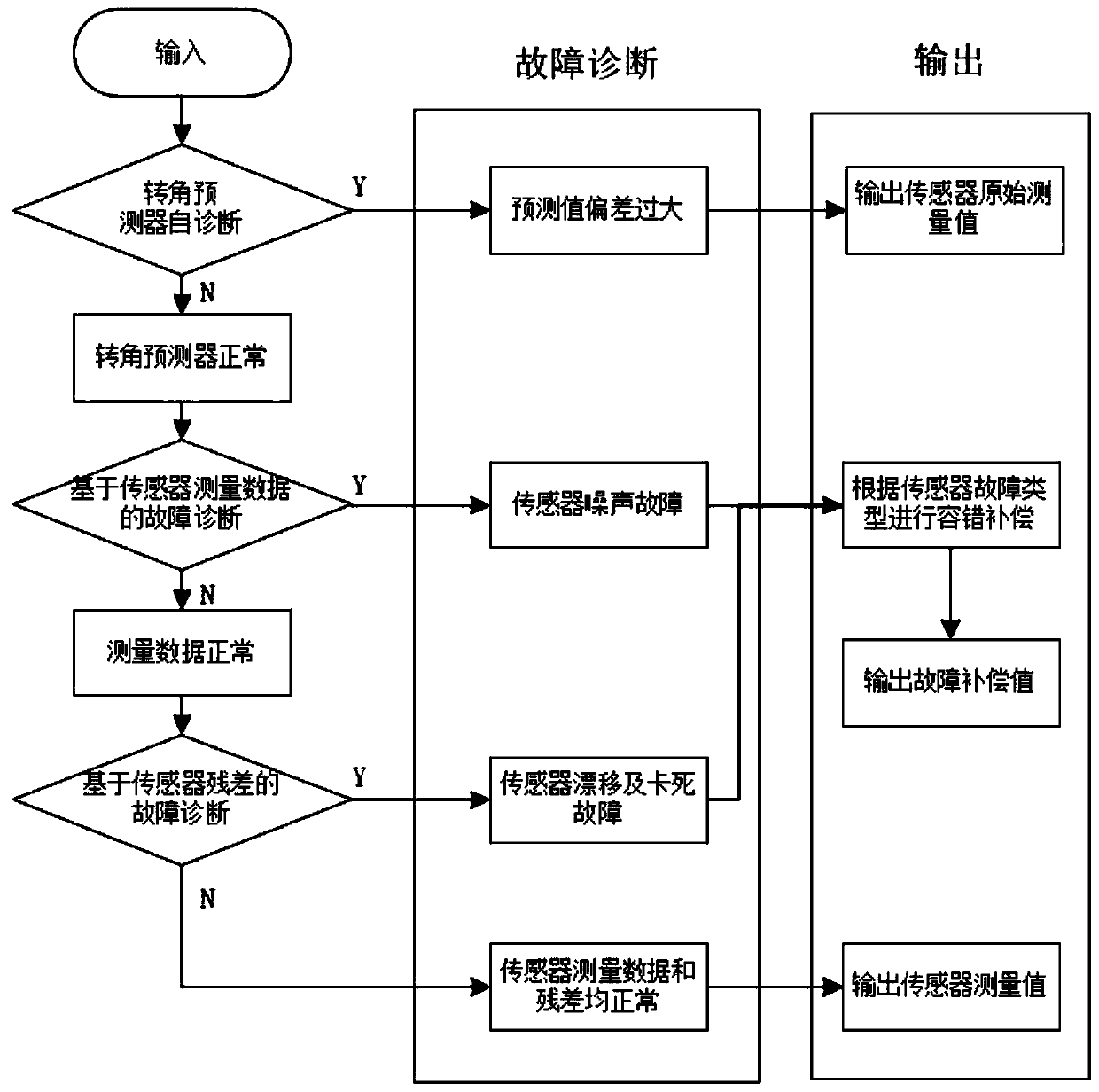
[0136] (3) Perform wheel angle prediction and predictor self-diagnosis;
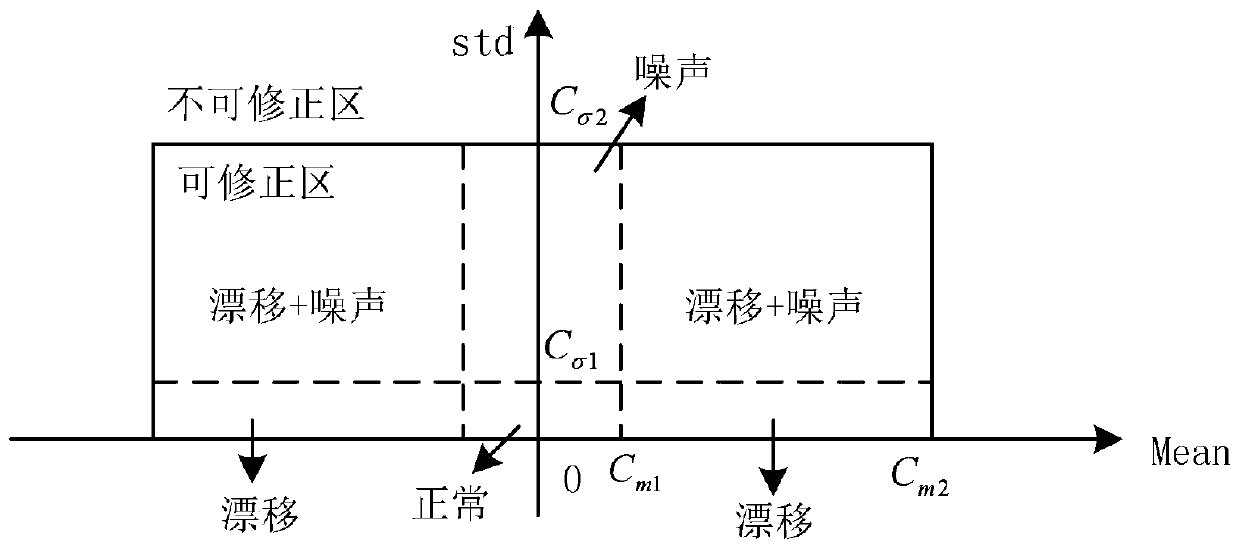
[0137] (4) Analyze the characteristics of sensor fault types and model various types of faults;
[0138] (5) Design a fault diagnosis algorithm based on sensor measurement data; design a fault diagnosis algorithm based on sensor data residuals; use the corresponding fault tolerance compensation algorithm according to the type of sensor fault;
[0139] (6) Design the fault diagnosis method, fault type judgment method and fault tolerance compensati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More