

Flight control management system and method for multi-rotor unmanned aerial vehicle
A multi-rotor unmanned aerial vehicle, flight control technology, applied in the field of multi-rotor unmanned aerial vehicle flight control management system, can solve problems such as low efficiency and difficult operation, achieve reduced technical requirements, simple operation, and reduced flight range redundancy degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
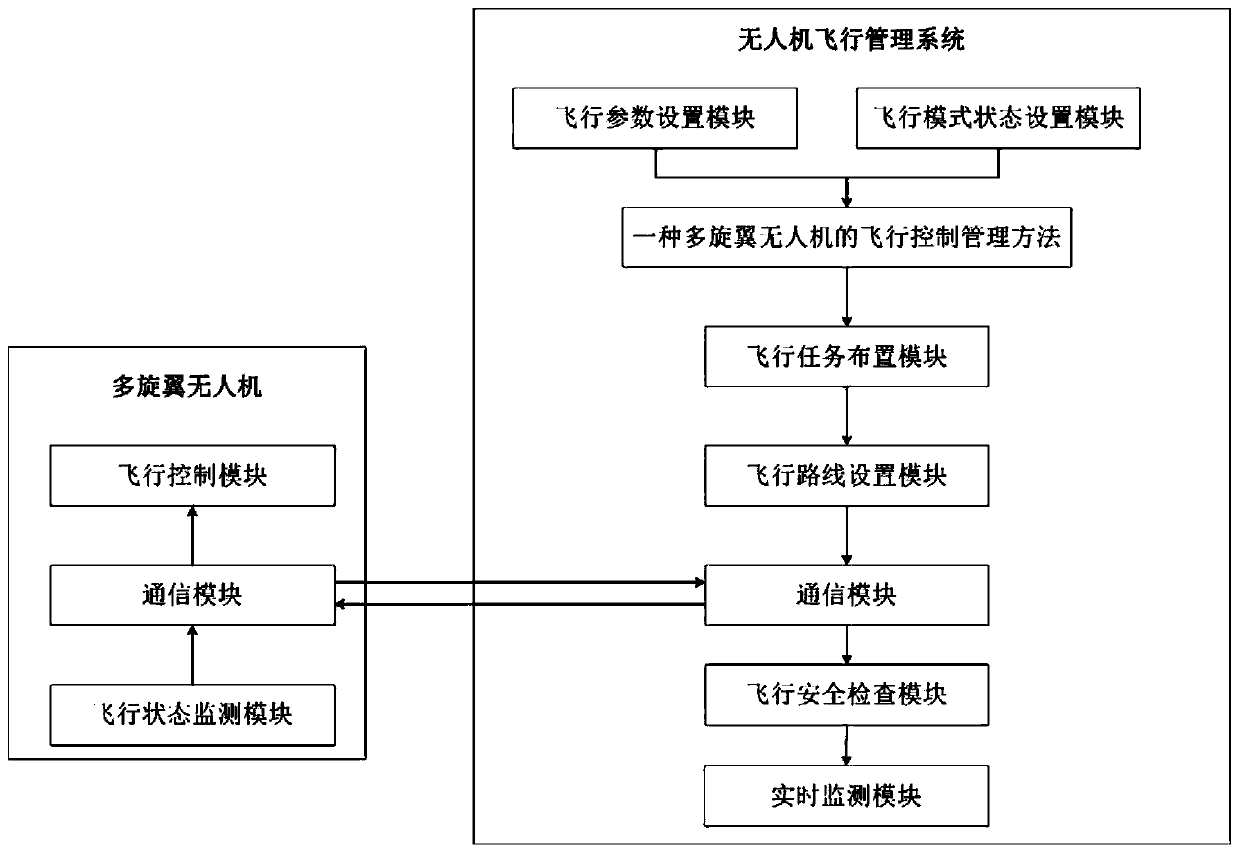
[0044] Specific implementation mode one: refer to figure 1 Describe this embodiment in detail, the flight control management system of a kind of multi-rotor unmanned aerial vehicle described in this embodiment, comprises: flight task setting module, flight task arrangement module, flight route setting module, communication module, flight safety inspection module, Real-time monitoring module, UAV flight control module and UAV flight status monitoring module;
[0045] The communication module includes a UAV communication module and a system communication module,
[0046] The flight task setting module is used to set the flight parameters of the multi-rotor UAV,
[0047] The flight task arrangement module is used to set the flight task area of the multi-rotor UAV,
[0048] The flight route setting module is used to draw and display the flight trajectory of the multi-rotor UAV according to the flight parameters and the flight mission area of the multi-rotor UAV,
[0049]The...
specific Embodiment approach 2
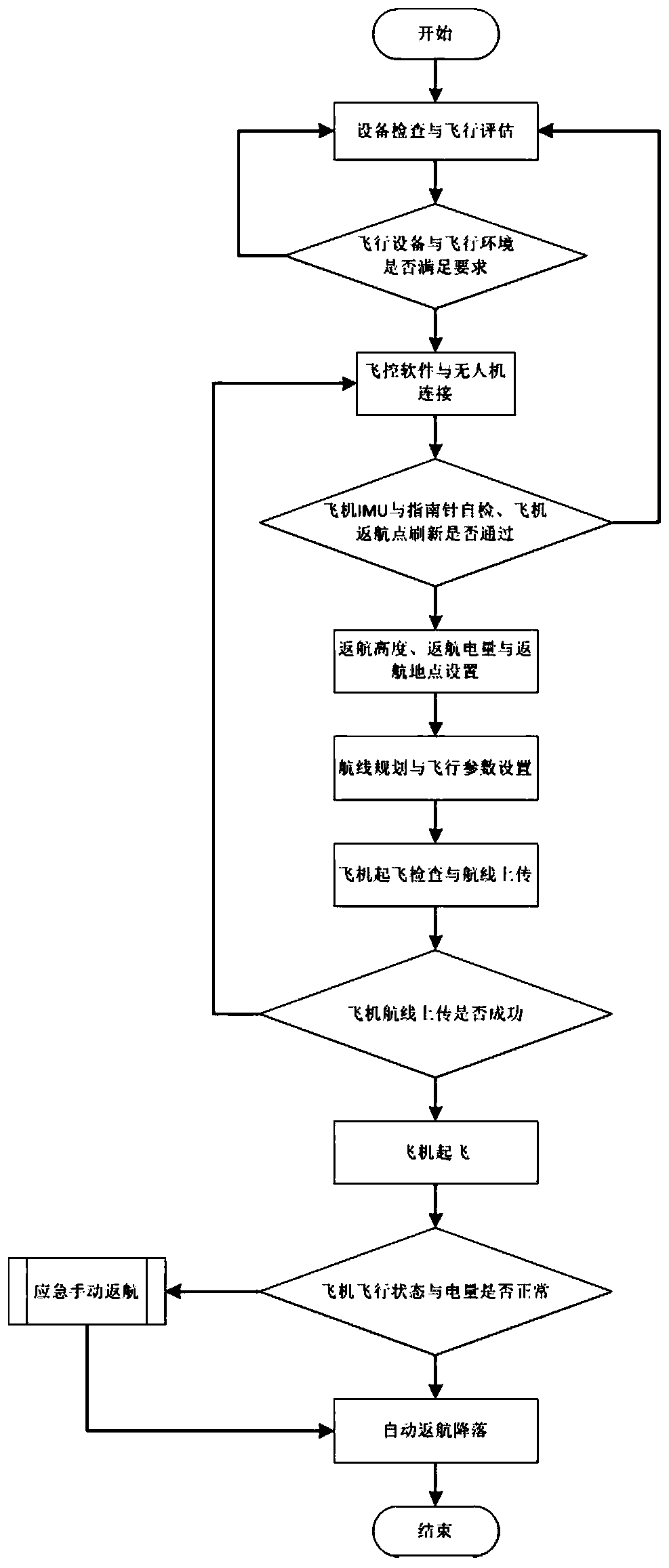
[0058] Specific implementation mode two: refer to figure 2 This embodiment is described in detail. This embodiment relates to a flight control management method of a multi-rotor unmanned aerial vehicle. The technical solution for realizing the present invention is as follows:
[0059] A flight control management method for a multi-rotor UAV, comprising the following steps:
[0060] Step 1, the flight parameter setting module of the present invention refers to setting flight altitude, lateral overlap and course overlap.
[0061] The flight mode setting module of the present invention refers to setting the unmanned flight mode of multi-rotor, including orthophoto, 360-degree panorama, plant protection mode, line patrol mode, etc., setting the UAV flight control management mode through the flight mode, It mainly affects flight trajectory planning and setting.
[0062] Step 2, the flight task arrangement module of the present invention refers to the delineation of the flight ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More