

Real-time trajectory prediction method for unmanned aerial vehicle
A trajectory prediction, UAV technology, applied in neural learning methods, biological neural network models, instruments, etc., can solve the problems of slow trajectory prediction, difficult identification of UAV flight status, and low trajectory prediction accuracy. Prediction accuracy, avoidance of dynamic modeling, and the effect of improving management systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
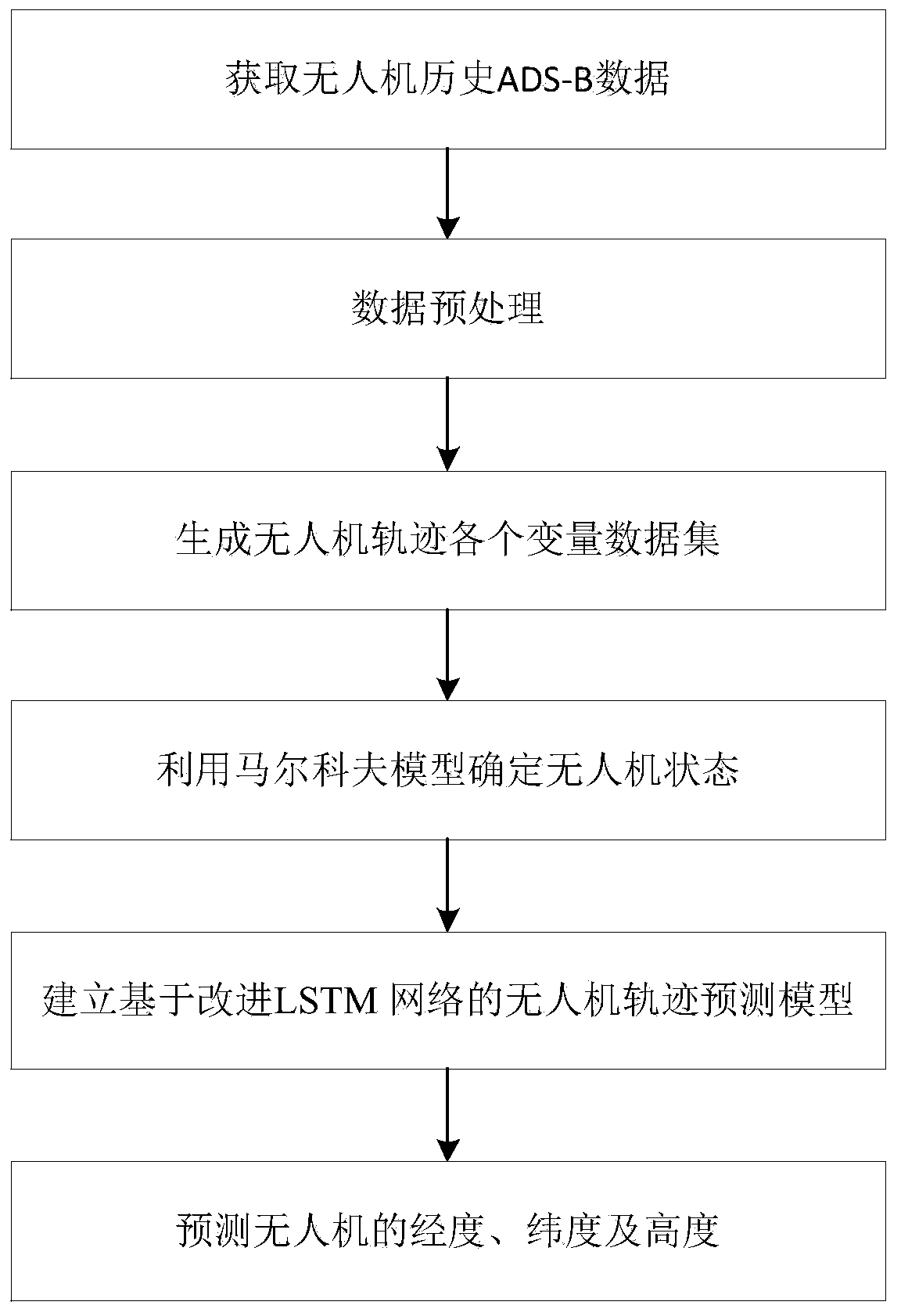
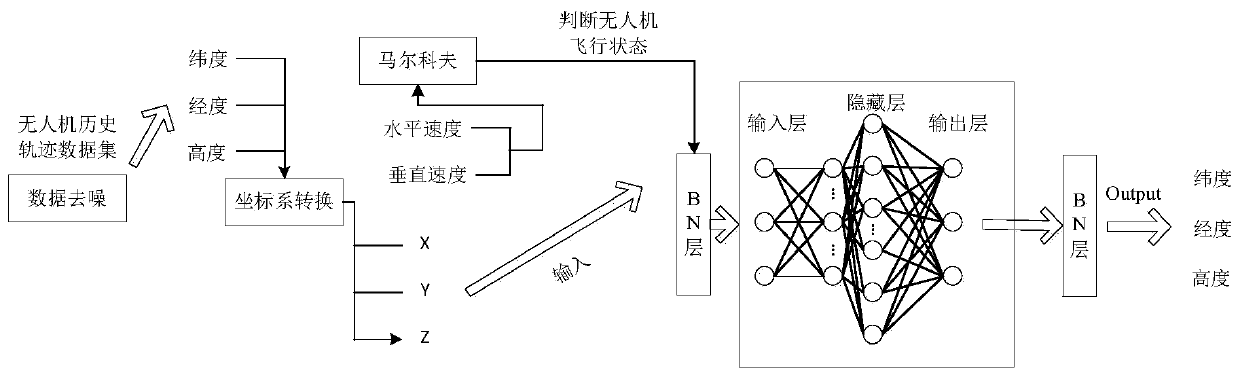
[0064] refer to figure 1 , image 3 Shown, a kind of unmanned aerial vehicle real-time trajectory prediction method of the present invention, the steps are as follows:
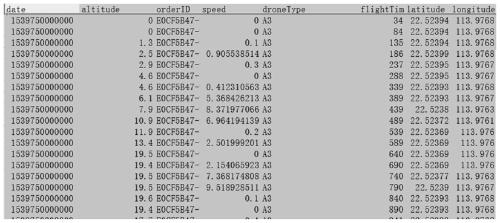
[0065] (1) Obtain data: collect historical ADS-B data of drones, see figure 2 As shown, the data information of drone timestamp, drone ID, latitude, longitude, altitude, horizontal speed, and flight time are obtained.
[0066] (2) Data preprocessing: sort the above-mentioned acquired data information by flight time, convert latitude and longitude into Cartesian coordinates; and delete data with non-fixed time intervals and non-obvious location information in the acquired data.
[0067] (3) Generate variable data sets of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More