

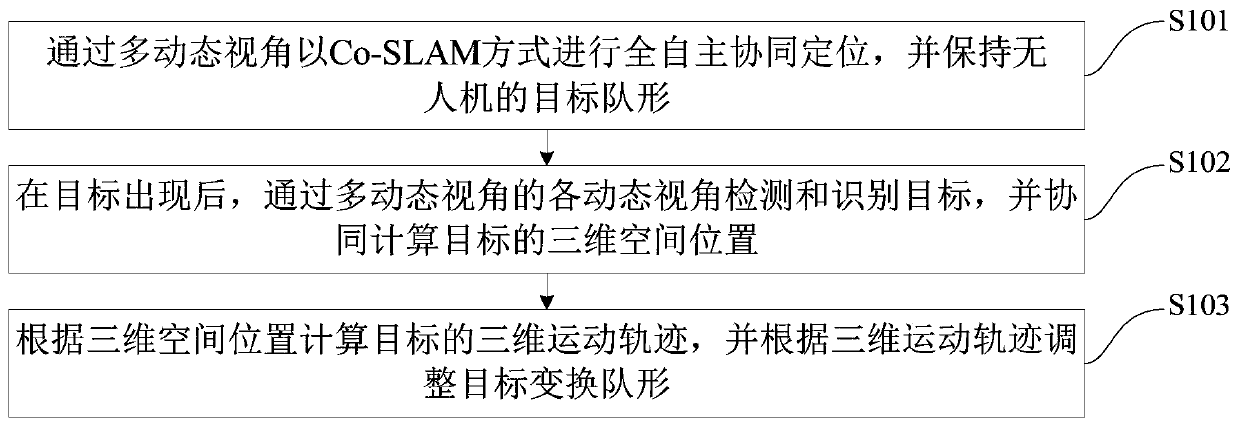
Multi-dynamic-view-angle cooperative aerial target recognition method and system
A technology of air target and recognition method, which is applied in the field of air target recognition method and system with multi-dynamic perspective coordination, can solve the problem of low applicability, and achieve the effect of ensuring the recognition effect and being simple and easy to implement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
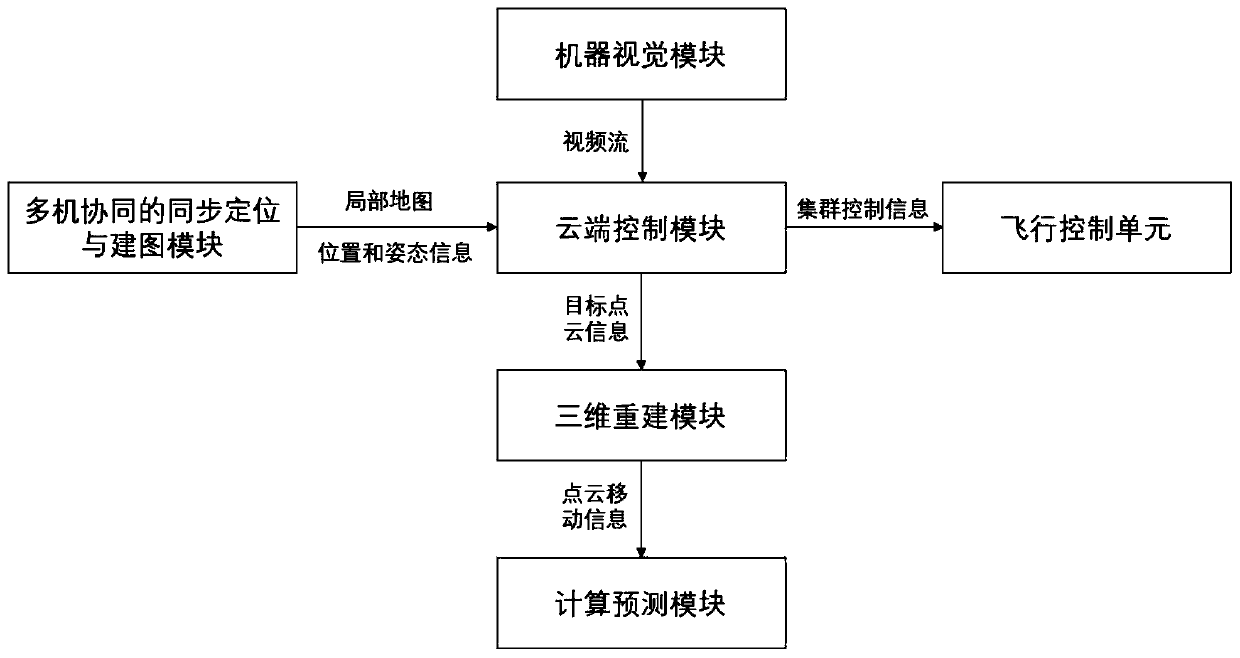
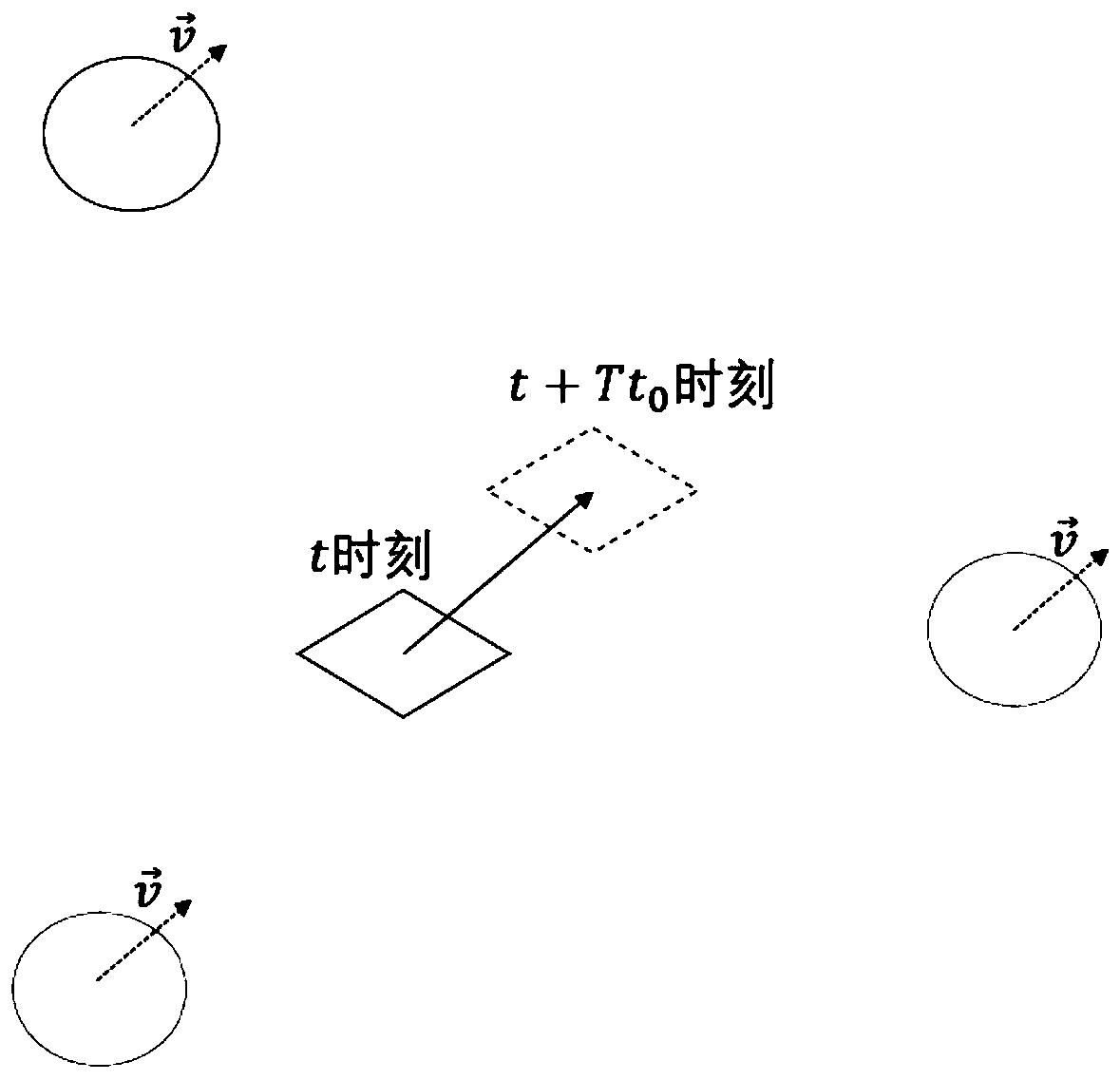
[0045] The air target recognition method and system with multi-dynamic viewing angle coordination proposed by the embodiment of the present invention, the system is composed of multiple multi-rotor UAVs equipped with visible light sensors to form a controllable multi-dynamic viewing angle, and the acquisition position and attitude of each viewing angle can be controlled by controlling the UAV accomplish. System block diagram as figure 2 shown. When the target position has a periodic offset, in order to ensure the recognition e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More