

Power transformer internal fault detection system based on wall-climbing robot
A wall-climbing robot and power transformer technology, applied in the field of power transformers, can solve problems such as difficulty in fault finding, increased risk of equipment and power grid failure, and low efficiency, so as to save manpower, reduce the probability of failure, and ensure safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
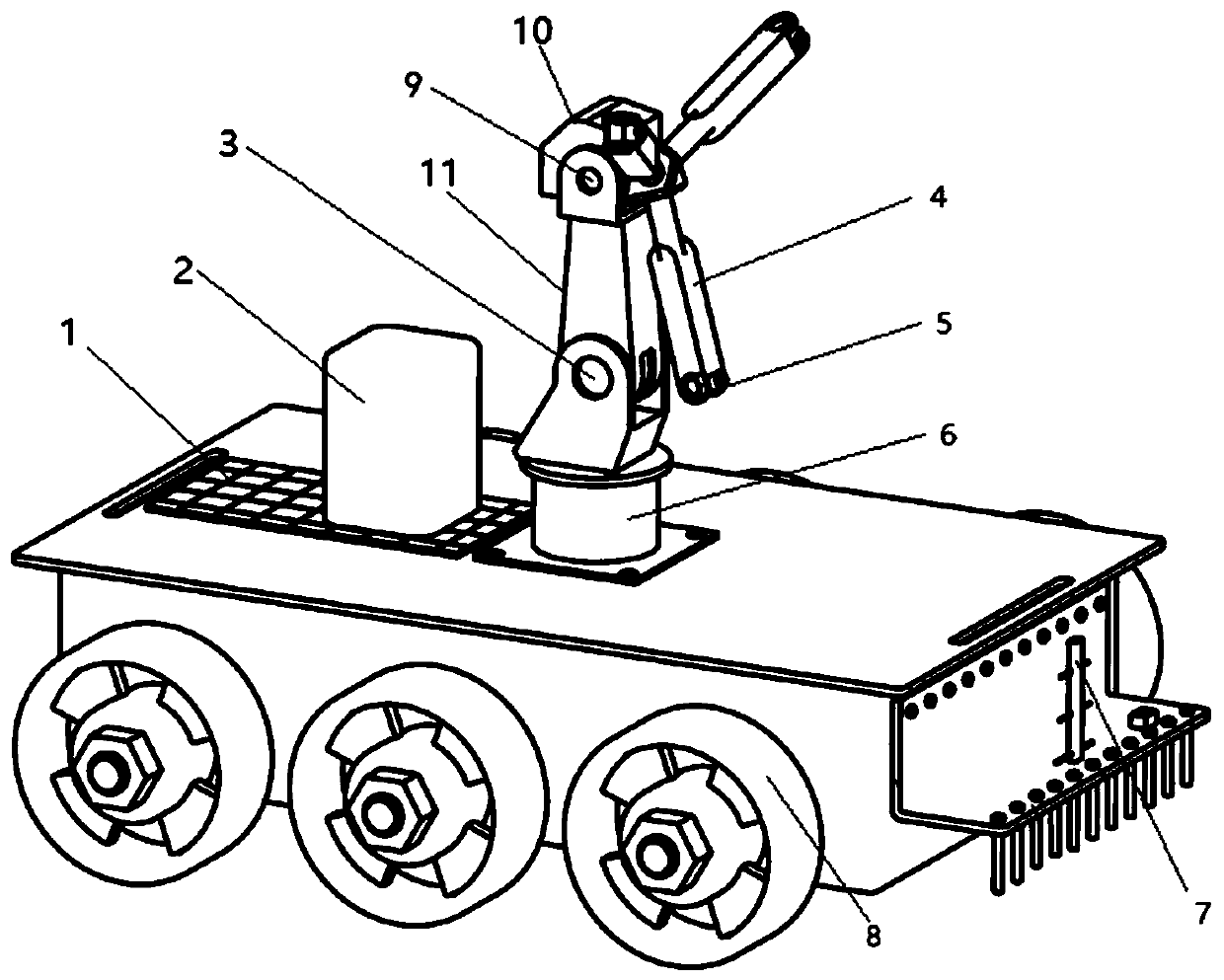
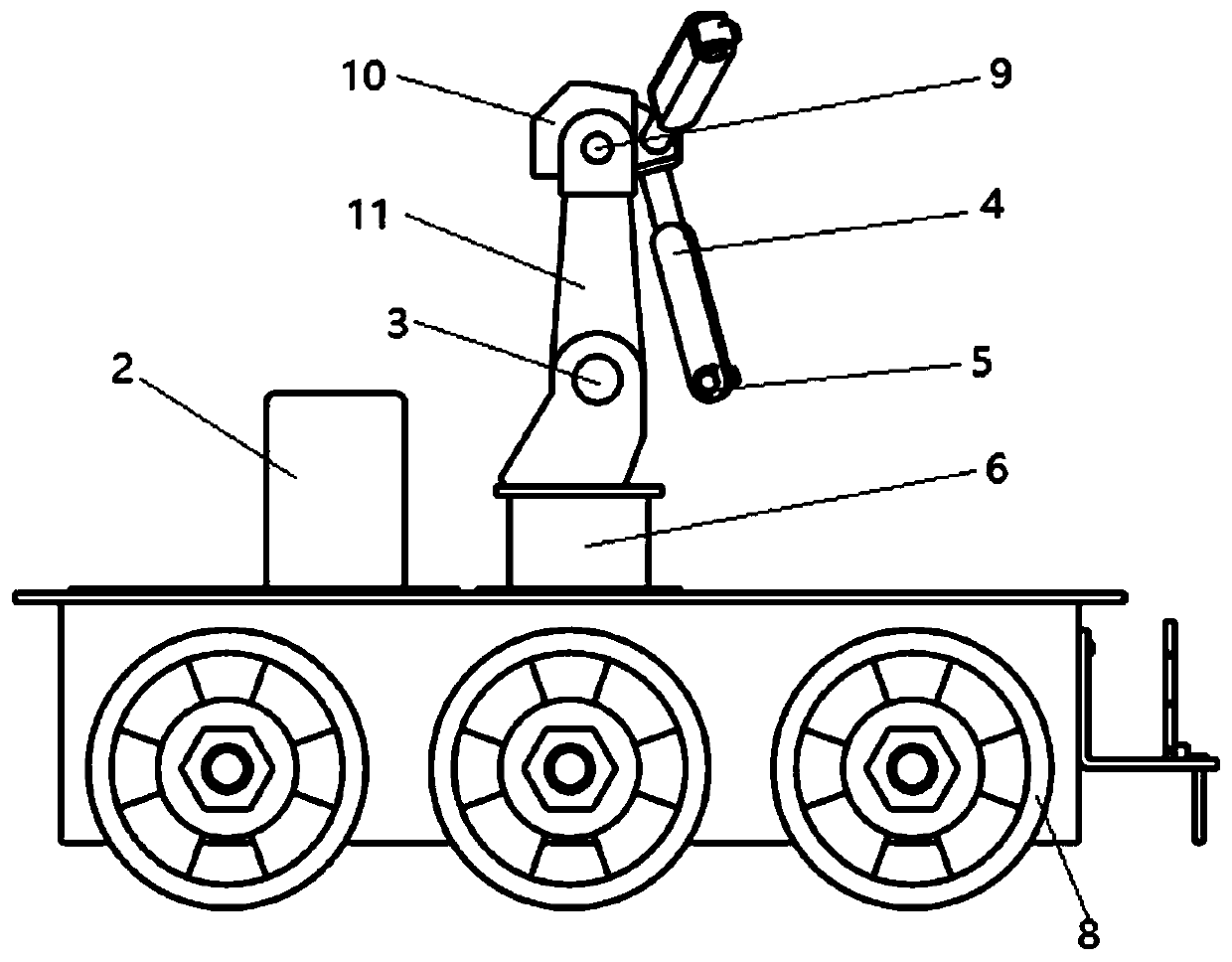
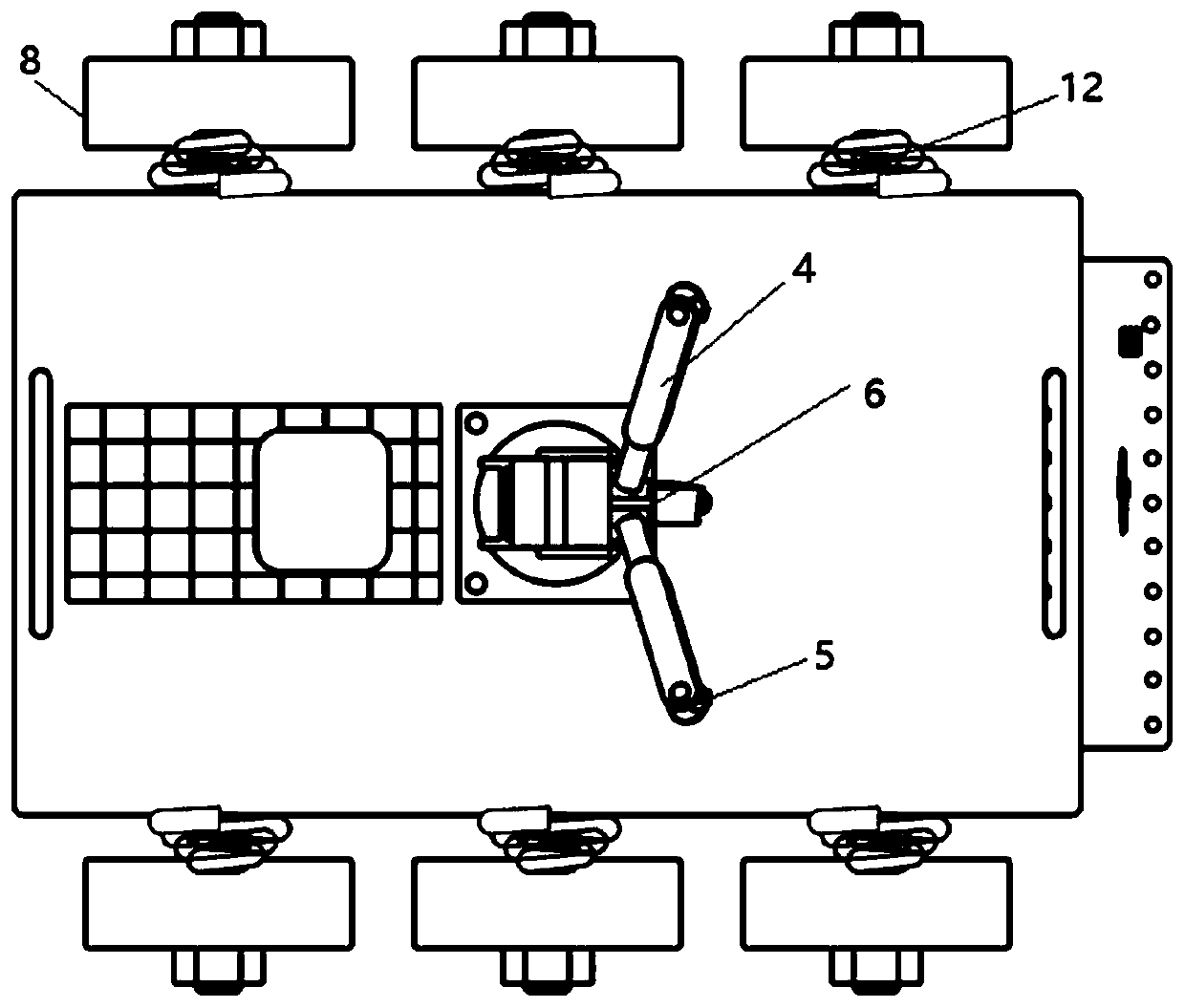
[0025] This embodiment provides a power transformer internal fault detection system based on a wall-climbing robot, such as Figure 1-Figure 3 shown, including:
[0026] A wall-climbing robot installed inside a power transformer. The wall-climbing robot includes a robot body, a driving mechanism, a robot main control device, and detection equipment. At least 3 visual sensors 5, the at least 3 visual sensors 5 are distributed in the same plane;
[0027] It also includes a rotary drive mechanism installed on the robot body, the robot main control device is connected to the rotary drive mechanism, and the rotary drive mechanism is used to drive the at least 3 vision sensors 5 realize 360° rotation in the same plane;
[0028] Described drive travel mechanism comprises a plurality of electromagnetic adsorption wheels 8, and each described electromagnetic adsorption wheel 8 one-to-one corresponding drive connection motor and driving circuit, and described a plurality of electromag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More