Artificial intelligence-imitated electronic low-torsion position control system
A technology of artificial intelligence and control system, applied in general control system, control/regulation system, electrical program control, etc., can solve the problems of increased risk of product damage, extensive and excessive product precision requirements, and reduce subsequent detection processes, The effect of improving efficiency and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
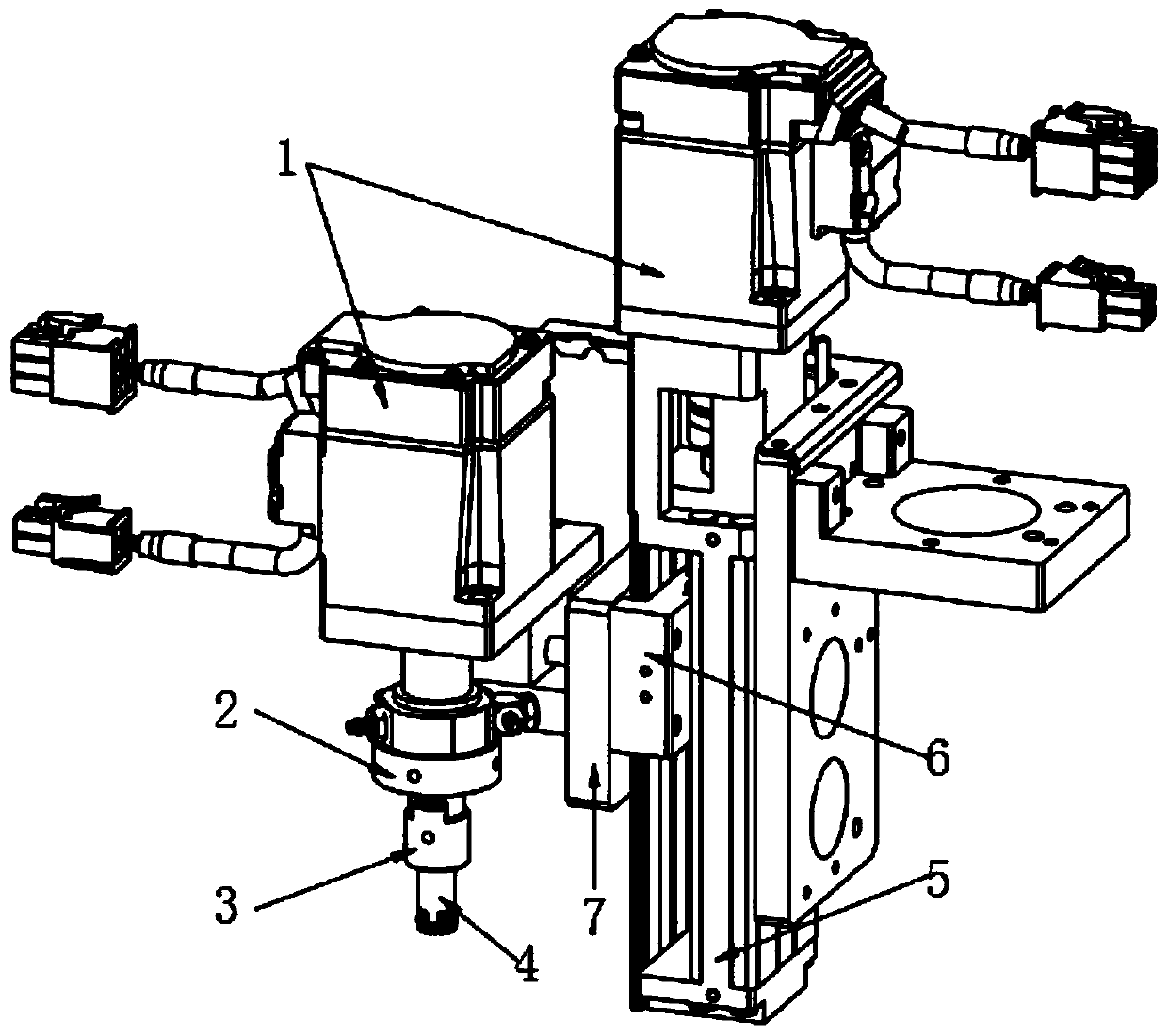
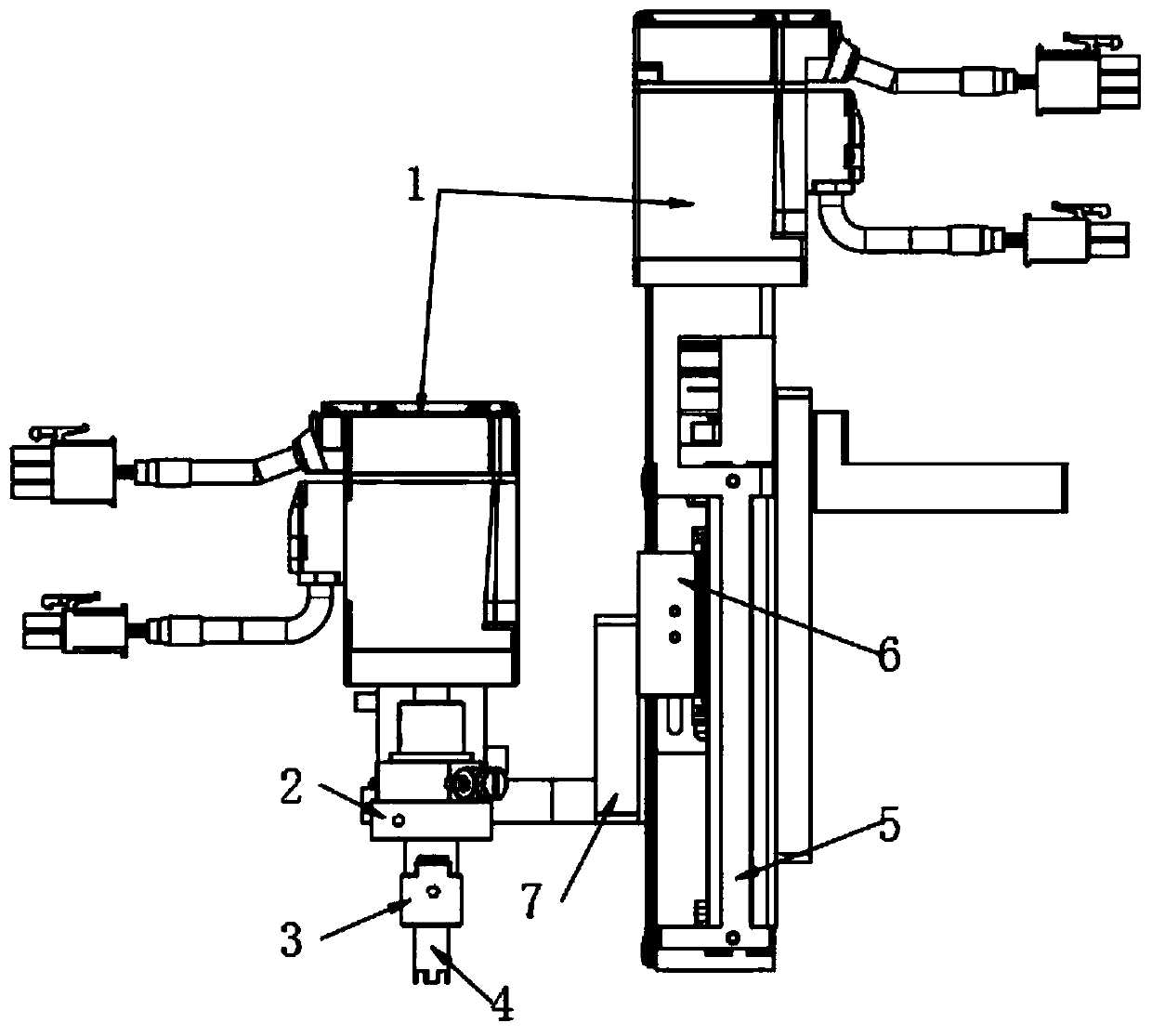
[0025] see Figure 1-4 , the present invention provides the following technical solutions: an artificial intelligence imitation electronic low-torque position control system, including two servo upper and lower mechanisms 1 and an external assembly A and an assembled object B, wherein the output end of one servo upper and lower mechanism 1 is screwed and fixed There is a servo rotating mechanism 2, and the output end of the servo rotating mechani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More