Leg mechanism with grabbing function
A technology of function and transmission mechanism, applied in the field of robot design, can solve the problem of increasing the weight of the robot, and achieve the effect of reducing the weight and eliminating the influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
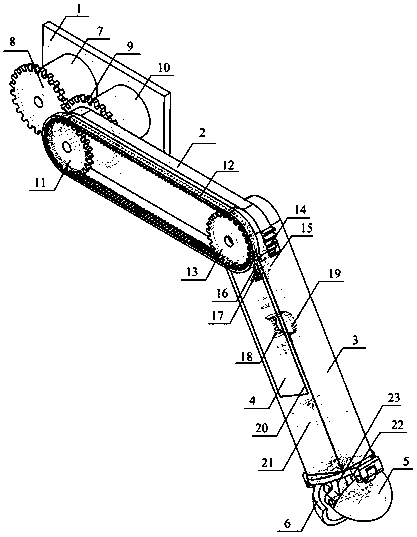
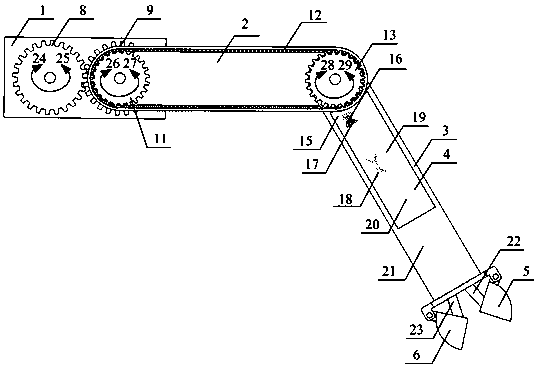
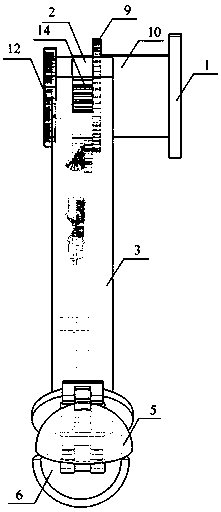
[0022] see Figure 1-9 , a leg mechanism with grabbing function, comprising frame 1, thigh 2, shank 3 and foot end parts, characterized in that the frame 1 is fixed with a first power machine 7 and a second power machine 10, the first power machine 7 The first spur gear 8 is fixedly installed on the output shaft of the upper leg 2. The upper end of the thigh 2 is provided with a second spur gear. The upper end of the thigh 2 is sleeved on the output shaft of the second power machine 10. The second spur gear meshes with the first spur gear 8. The third spur gear 11 is also fixedly installed on the output shaft of the second power machine 10, the upper end of the shank 3 is hingedly connected with the end of the thigh 2, the outer side of the upper end of the shank 3 is provided with a fourth spur gear 13, the third spur gear 11 and the fourth spur gear 13 The transmission connection is realized through the synchronous belt 12, the end of the lower leg 3 is provided with a foot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com