

Collision processing method and device, sweeping equipment and computer readable storage medium
A processing method and equipment technology, applied in the computer field, to achieve the effect of effective obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
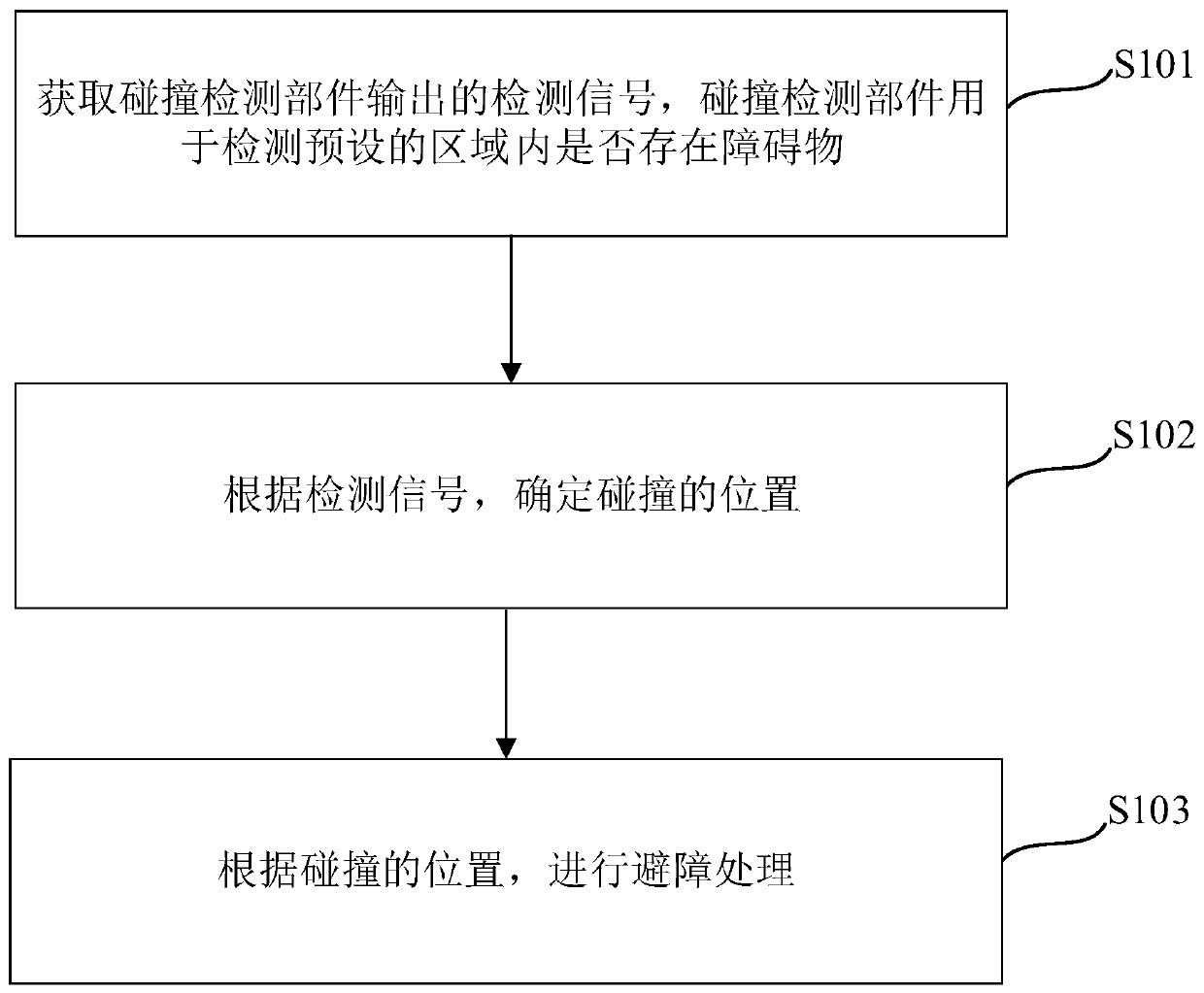
[0040] The embodiment of the present application provides a collision processing method, which is applied to sweeping equipment. Several collision detection components are set on the radome of the sweeping equipment. The schematic flow chart of the method is as follows figure 1 As shown, the method includes:
[0041] S101. Obtain a detection signal output by a collision detection component, and the collision detection component is used to detect whether there is an obstacle in a preset area.
[0042] S102. Determine the location of the collision according to the detection signal.
[0043] S103, perform obstacle avoidance processing according to the location of the collision.
[0044] In the embodiment of the present application, the detection signal output by the collision detection component is obtained, and the collision detection component is used to detect whether there is an obstacle in the preset area; determine the position of the collision according to the detection sig...
Embodiment 2
[0051] Based on the same inventive concept as the foregoing embodiment 1, this embodiment illustrates the technical solution of the foregoing embodiment 1 through specific examples.
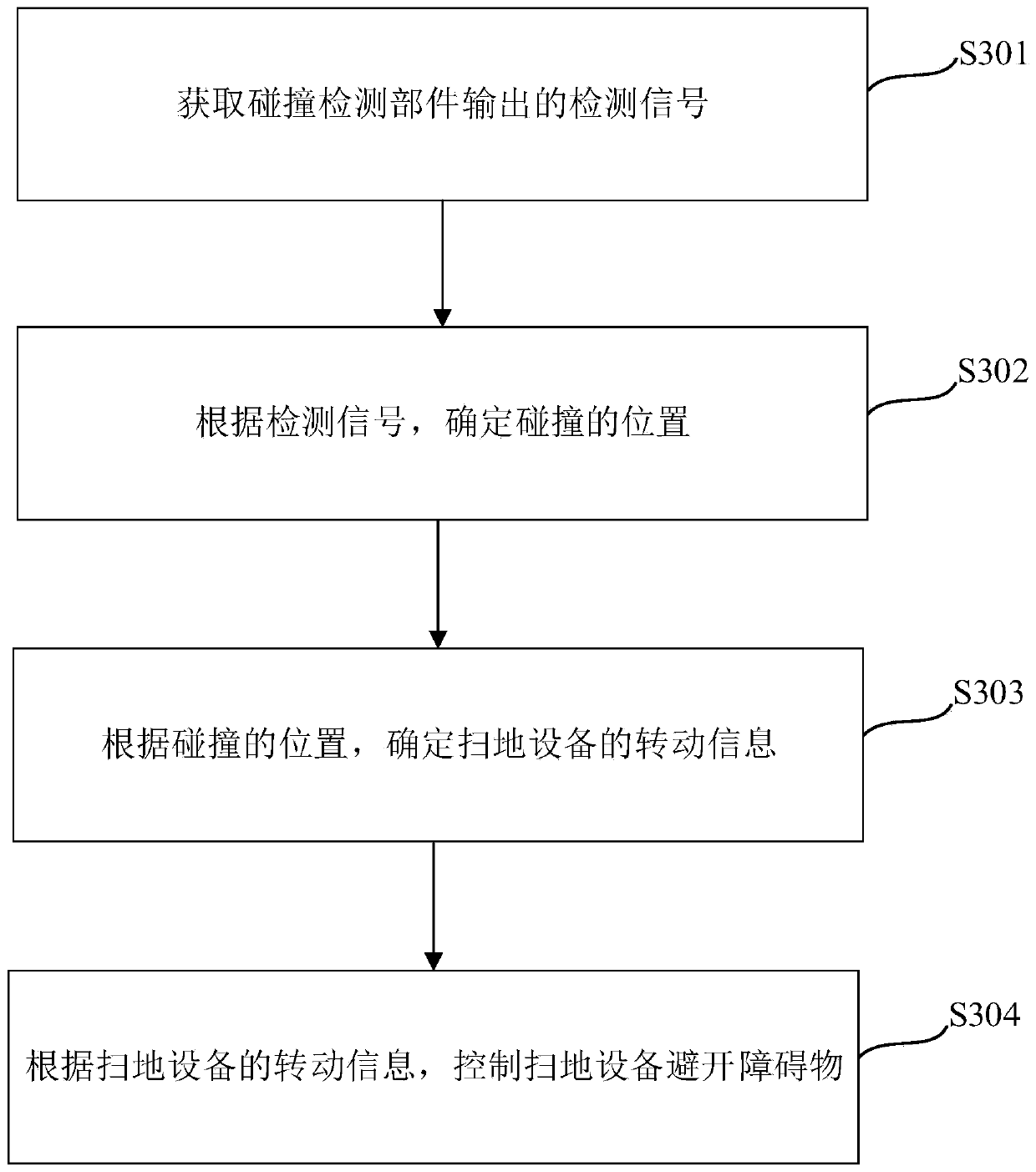
[0052] see image 3 , image 3 A schematic flow chart of another collision processing method provided in the embodiment of the present application, such as image 3 As shown, the method is applied to sweeping equipment, and the method specifically includes:
[0053] S301. Obtain a detection signal output by a collision detection component.
[0054] Optionally, when the sweeping device is moving, the pressure electrical signal output by the collision detection component is obtained when the radome is subjected to an external force, the collision detection component includes at least one of a pressure sensor and a mechanical collision switch, and the detection output of the collision detection component The signal is a pressure electrical signal. When the radome is subjected to an external forc...
Embodiment 3
[0071] Based on the same inventive concept, the embodiment of the present application also provides a collision processing device, which is applied to the sweeping equipment. Several collision detection components are arranged on the radome of the sweeping equipment. The structural diagram of the device is as follows Figure 4 As shown, the collision processing device 40 includes a first processing module 401 , a second processing module 402 and a third processing module 403 .
[0072] The first processing module 401 is configured to acquire the detection signal output by the collision detection component, and the collision detection component is used to detect whether there is an obstacle in the preset area;
[0073] The second processing module 402 is configured to determine the location of the collision according to the first detection signal;
[0074] The third processing module 403 is configured to perform obstacle avoidance processing according to the location of the col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More