Man-machine hybrid coordinated motion user intention estimation method and system
A hybrid system and motion intention technology, applied in the field of intelligent robots, can solve problems such as uncoordinated walking and falls, and achieve the effects of preventing uncoordinated motion, smooth motion control, and avoiding unsafe walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
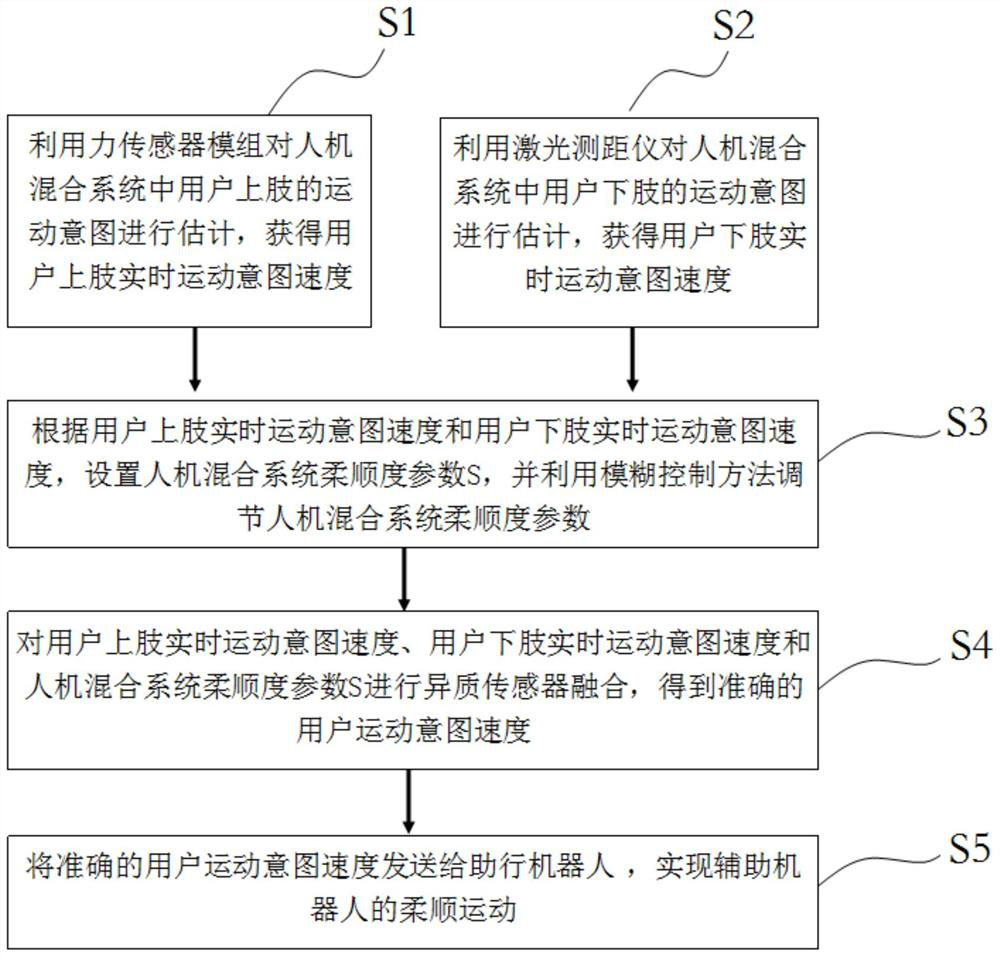
[0050] Such as figure 1 As shown, the present invention provides a method for estimating user intentions of a human-machine hybrid system coordinated movement, comprising the following steps:
[0051] S1. Use the force sensor module 1 to estimate the movement intention of the user's upper limbs in the human-machine hybrid system, and obtain the real-time movement intention velocity V of the user's upper limbs H ;
[0052] S2. Use the laser rangefinder 2 to estimate the movement intention of the user's lower limbs in the human-machine hybrid system, and obtain the real-time movement intention velo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More