

Multi-robot cooperative control method and device and computer equipment
A collaborative control and multi-robot technology, applied in the field of control, can solve the problems of high complexity and difficulty in accurately realizing the collaborative control of multiple robots, and achieve the effect of precise collaborative control and reducing control deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Hereinafter, the present application will be described in detail with reference to the drawings and embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
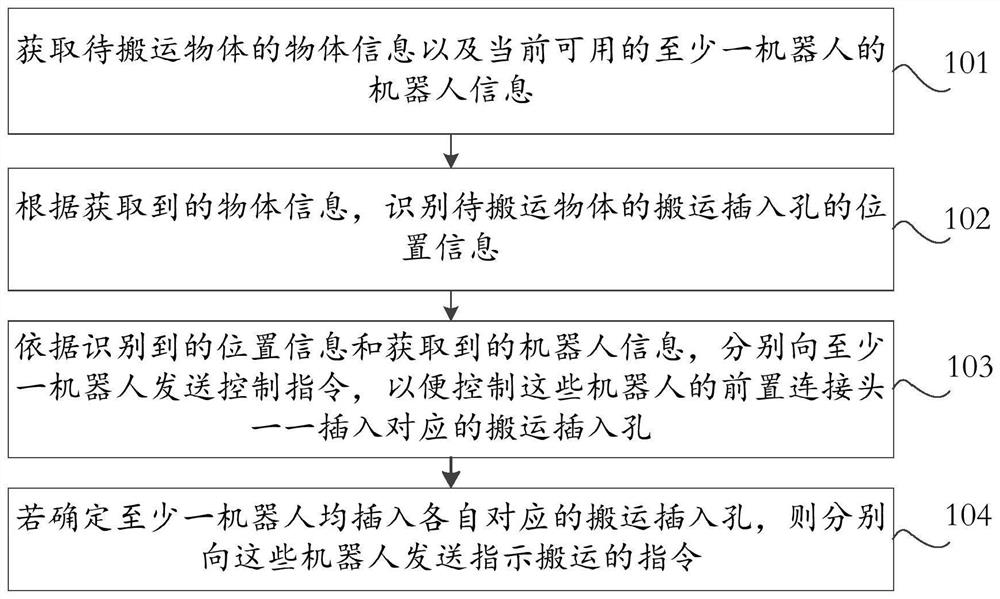
[0026] Aiming at the technical problem that the current method of manual control of multi-robot collaboration is relatively complex, and it is difficult to accurately realize the collaborative control of multiple robots, this embodiment provides a multi-robot collaborative control method, which can replace manual operations for precise multi-robot control. Cooperative control of robots, such as figure 1 As shown, the method includes:
[0027] 101. Acquire object information of an object to be transported and robot information of at least one robot currently available.
[0028] Wherein, the object information may include information such as the external dimensions and weight of the object, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More