

Intelligent library management robot and borrowing method thereof
A book management and robotics technology, applied in the field of robotics, can solve the problems of high difficulty for robots, low book management scope, low book retrieval efficiency, etc., to reduce the investment of human resources, improve service efficiency and informatization level , the effect of convenient management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
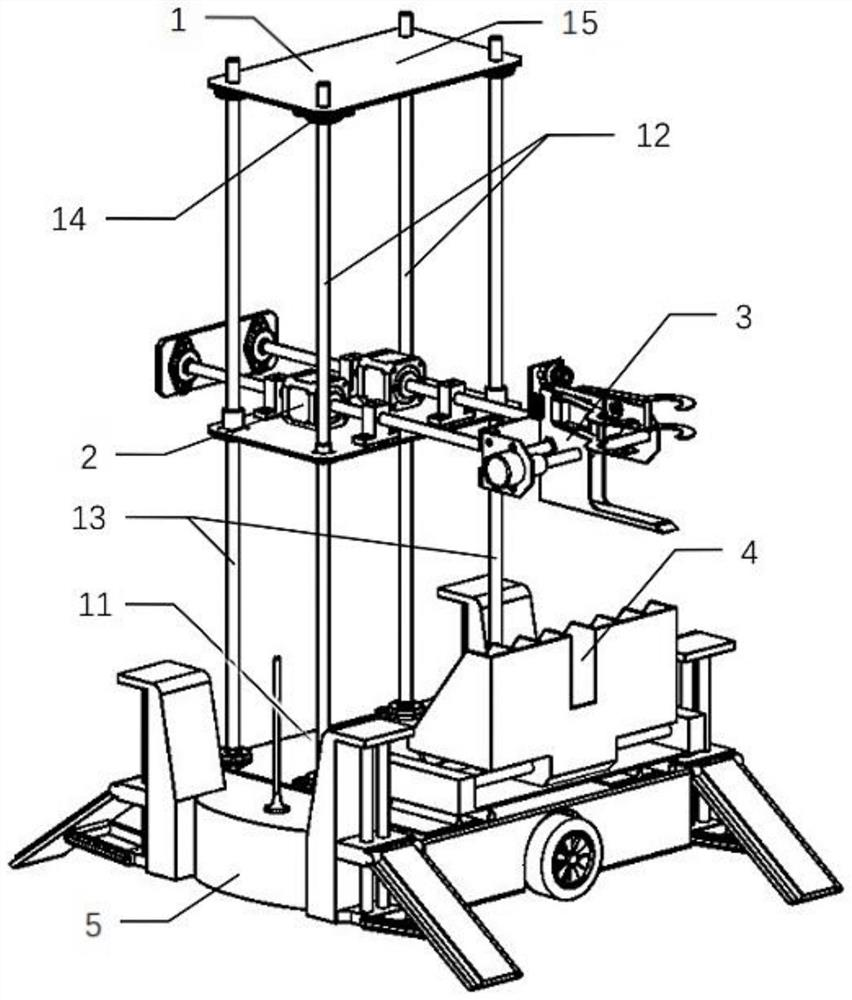
[0060] see figure 1 , an intelligent library management robot, including a moving chassis 5, a lifting mechanism 1, a telescopic mechanism 2, a book clamp 3, and a book temporary storage rack 4.
[0061] The lifting mechanism 1 is installed on the top of the moving chassis 5, and is used to drive the vertical lifting of the telescopic mechanism 2 and the book holder 3. The lifting mechanism 1 includes a first servo motor (not shown in the figure), a support bottom plate 11 , a support top plate 15 , two first lead screws 12 and two first optical axes 13 .
[0062] The support top plate 15 and the support bottom plate 11 are rectangular plates, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More