

Motor torque control method and system
A technology of motor torque and control method, which is applied in the direction of control drive, control device, electric vehicle, etc., to prevent slope slippage and improve the timeliness of dynamic response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
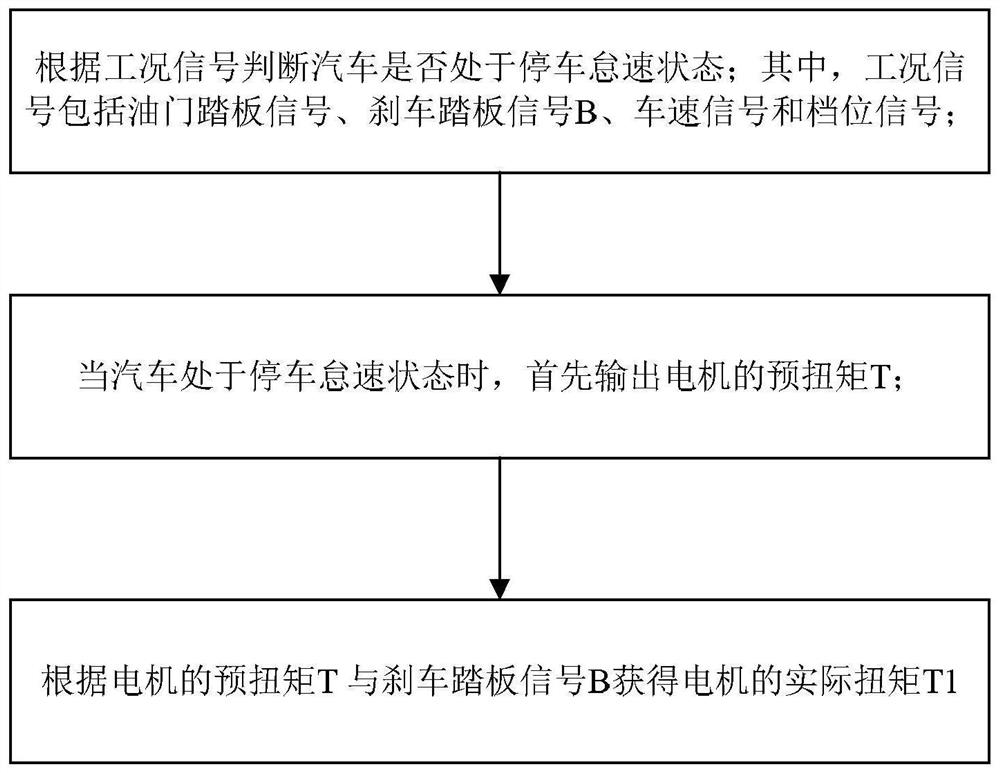
[0036] In order to solve the problem in the prior art that the brake is completely released and enters the creeping working condition, there will be a certain time delay until the vehicle controller calculates and outputs the torque, such as figure 1 As shown, the implementation of this embodiment discloses a motor torque control method, judging whether the car is in the parking idle state according to the working condition signal; wherein, the working condition signal includes the accelerator pedal signal, the brake pedal signal B, the vehicle speed signal and the gear Bit signal; when the car is in the parking idle state, first output the pre-torque T of the motor; obtain the actual torque T1 of the motor according to the pre-torque T of the motor and the signal B of the brake pedal.
[0037] Specifically, the accelerator pedal signal can be obtained through the accelerator pedal sensor; the brake pedal signal B can be obtained through the brake pedal sensor; the vehicle spee...
Embodiment 2
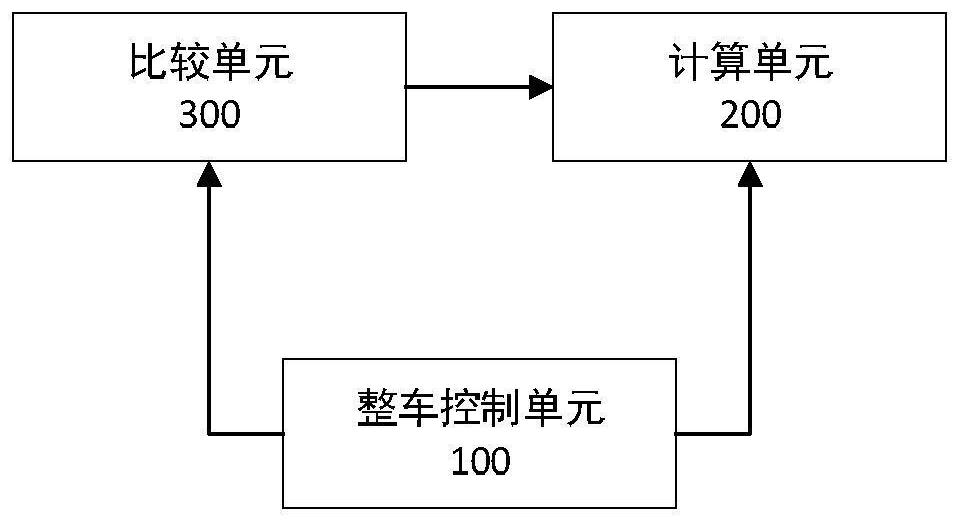
[0048] Such as figure 2 As shown, the present embodiment provides a motor torque control system, including a vehicle control unit 100 and a computing unit 200 connected by communication, and the vehicle control unit 100 detects the working condition signal to determine whether the vehicle is in a parking idle state; wherein, the working Condition signal includes accelerator pedal signal, brake pedal signal B, vehicle speed signal and gear position signal; The pedal signal B obtains the actual torque T1 of the motor.
[0049] Specifically, the vehicle control unit 100 detects the working condition signal to determine whether the vehicle is in a parked idle state; wherein the working condition signal includes an accelerator pedal signal, a brake pedal signal B, a vehicle speed signal and a gear position signal. Therefore, the vehicle control unit 100 may include an accelerator pedal sensor for obtaining the accelerator pedal signal; the vehicle control unit 100 may also includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More