Texture-free three-dimensional object tracking method based on confidence and feature fusion
A three-dimensional object and feature fusion technology, applied in the field of computer vision, can solve problems such as failure and inconsistent error measurement, and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0068] A texture-free 3D object tracking method based on confidence and feature fusion, the tracking method includes the following steps:
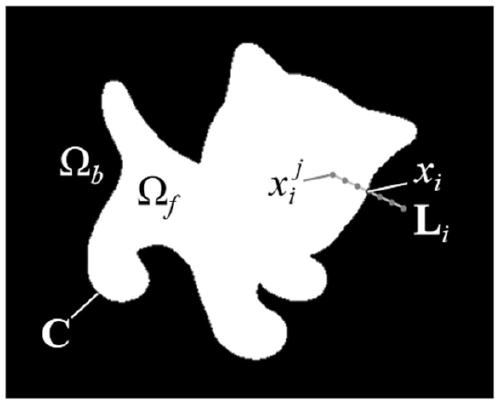
[0069] (1) Input the three-dimensional model of the tracking object, each frame of the image taken by the RGB monocular camera, and the first frame of pose into the computer, and use the color histogram according to the color information of the front scenic spot, the background point and the uncertain area point. Establish the corresponding color model of the foreground area, the color model of the background area, and the color model of the uncertain area;
[0070] The color histogram shows the proportion of different colors in the entire area;
[0071] In step (1), the point x in the uncertain region satisfies the conditions:
[0072] When point x is in the foreground area, but P f b , P f Represents the probability that point x belongs to the foreground, P b Indicates the probability that point x belongs to the background; or when point x is in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com