

Unmanned aerial vehicle path planning method for reconstructing Voronoi diagram in real time
A path planning, unmanned aerial vehicle technology, applied in the direction of vehicle position/route/height control, non-electric variable control, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
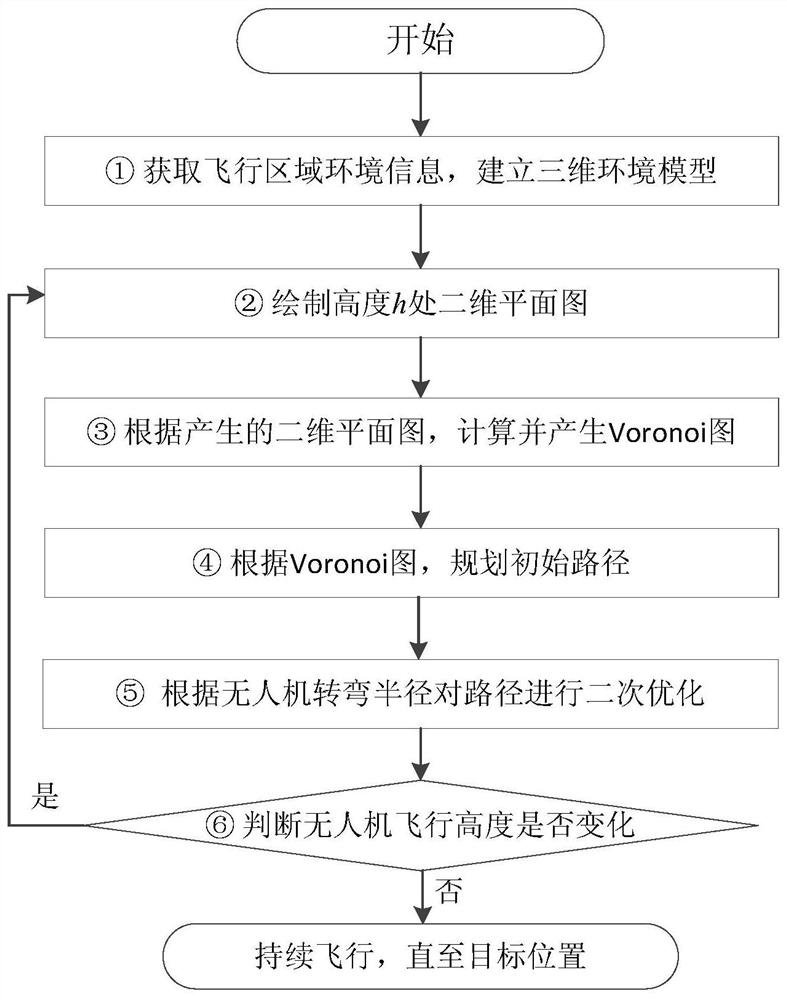
[0032] Such as figure 1 As shown, a real-time reconstructed Voronoi diagram UAV path planning method, which includes the following steps:
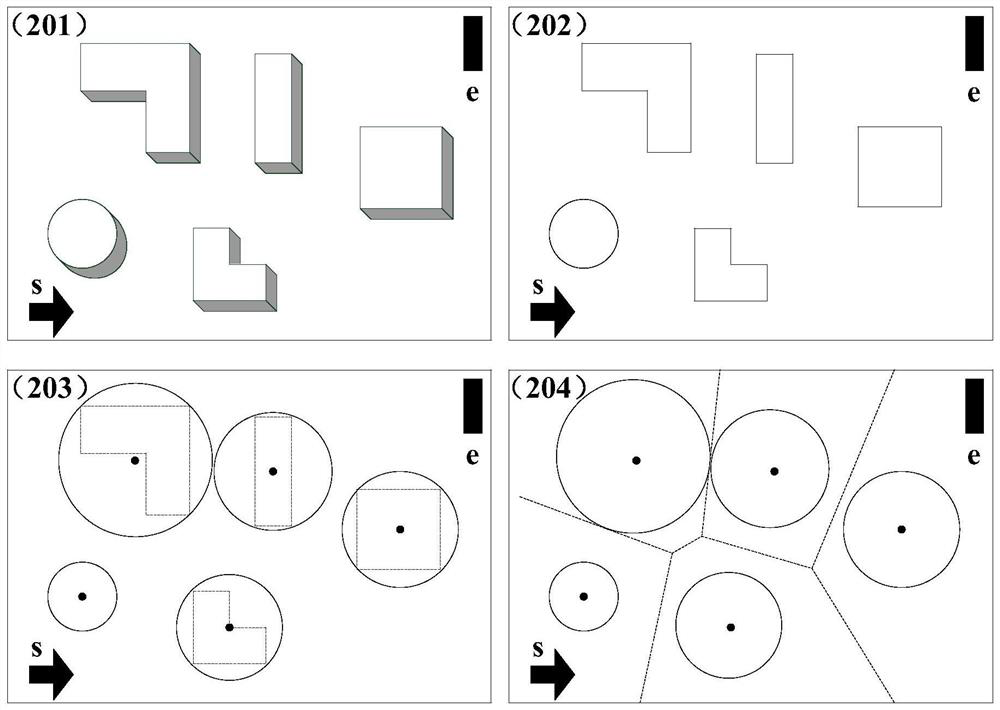
[0033] S1, obtain the environmental information of the UAV flight area, and establish a three-dimensional environmental threat model;
[0034] S2, determine the flying height of the UAV, and draw a two-dimensional plane threat map at the height;
[0035] S3, according to the two-dimensional plane threat map generated in step S2, and using the vector method to generate a Voronoi diagram;
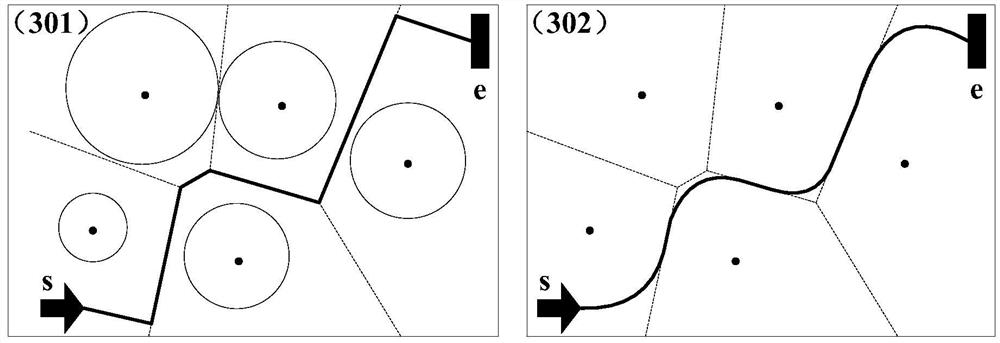
[0036] S4, planning and generating an initial path according to the Voronoi diagram generated in step S3;
[0037] S5, to the initial path that step S4 generates, carry out secondary optimization according to unmanned aerial vehicle performance parameter, generate flight path;
[0038] S6. Du...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More