

Hybrid robot for leg joint rehabilitation
A technology of robots and hybrid mechanisms, applied in passive exercise equipment, physical therapy and other directions, can solve the problems that robots have few practical applications, cannot meet the convenience requirements of knee joint rehabilitation training, etc., and achieves a large range of motion. Improve sports comfort and take up less space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
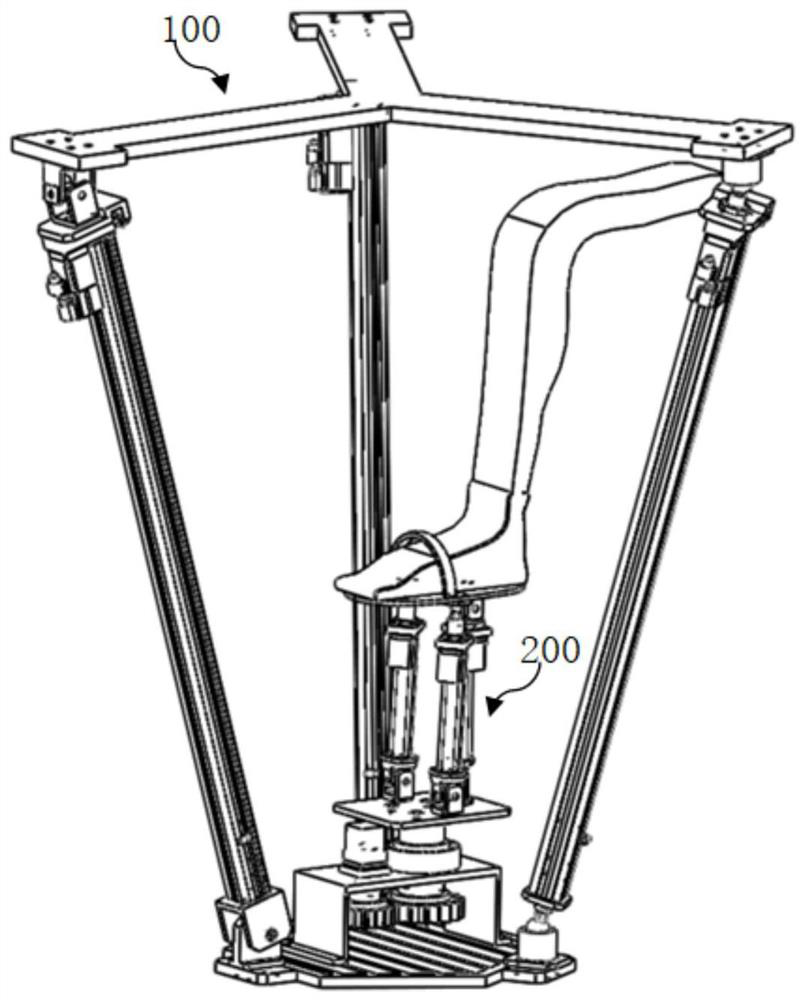
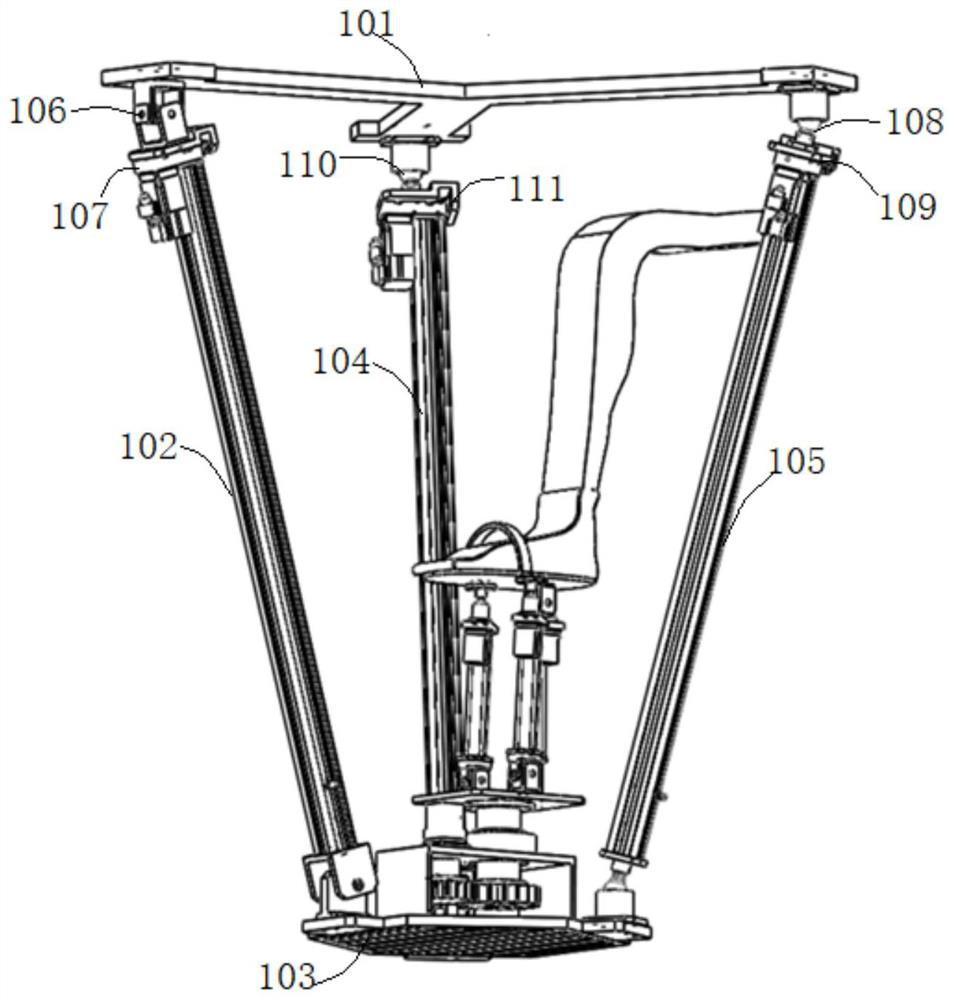
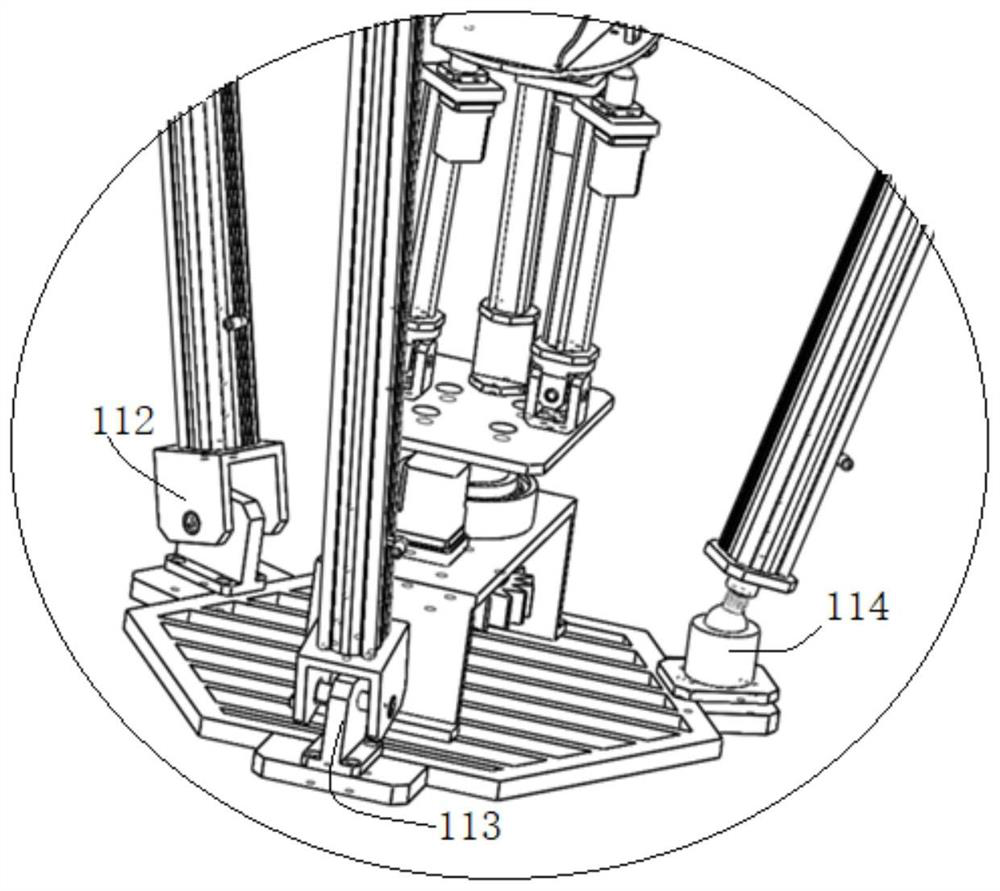
[0041] like Figure 1-Figure 8As shown, a hybrid robot for leg joint rehabilitation in this embodiment includes a knee joint parallel mechanism 100 and an ankle joint hybrid mechanism 200, wherein the knee joint parallel mechanism 100 includes a knee joint static platform 101 and a knee joint dynamic platform distributed up and down. Platform 103, knee joint driving module 1 102, knee joint driving module 2 104 and knee joint driving module 3 105 are connected between knee joint static platform 101 and knee joint dynamic platform 103 in a triangular distribution; The tops of group 2 104 and knee joint drive module 3 105 are respectively connected to the knee joint static platform 101 through ball joints; the top of knee joint drive module 1 102 is connected to the knee joint static platform 101 through a Hooke hinge; the knee joint drive module The bottom of the third 105 is connected with the knee joint dynamic platform 103 through a ball joint, and the bottoms of the knee jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More