Single-camera multi-view calibration method based on robot
A calibration method and robot technology, applied in the field of robot vision, can solve problems such as high cost, high cost, and inapplicability for large-scale promotion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
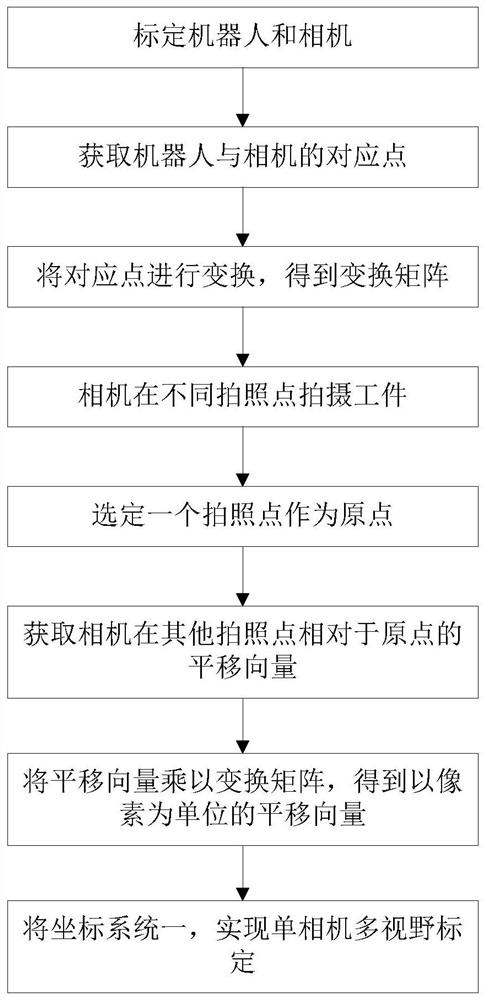
[0034] Such as figure 1 As shown, a robot-based single-camera multi-view calibration method includes the following steps:
[0035] S1: Calibrate the robot and camera;
[0036] S2: Obtain the corresponding points between the robot and the camera;
[0037] S3: Transform the corresponding points to obtain the transformation matrix T;
[0038] S4: The camera shoots the workpiece at different photo points;
[0039] S5: select a photographing point as the origin;
[0040] S6: Obtain the translation vector T of the camera at other photographing points relative to the origin through the robot i ;
[0041] S7: Multiply the translation vector by the transformation matrix to obtain the translation vector in pixels
[0042] S8: Use coordinate system 1 to realize single-camera multi-view calibration.
[0043] More specifically, in step S1, the camera plane and the robot base plane are kept parallel to the working plane.
[0044] More specifically, in step S2, at least three corre...
Embodiment 2
[0053] A robot-based single-camera multi-view calibration method is basically the same as the robot-based single-camera multi-view calibration method described in Embodiment 1, the difference being:
[0054] More specifically, in step S4, the camera is fixed at a fixed position, and the manipulator of the robot moves the workpiece to take pictures, so that the camera can take pictures of the workpiece at different photographing points.
[0055] More specifically, in step S6, the obtained translation vector needs to be multiplied by a coefficient -1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com