

Machine vision and millimeter wave radar fused multi-vehicle target tracking method
A millimeter-wave radar and machine vision technology, applied in the field of multi-vehicle target tracking, can solve the problems of missing effective targets and excessive size of the visual tracking bounding box, and achieve the effects of avoiding defects, rich feature information, and strong expression ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
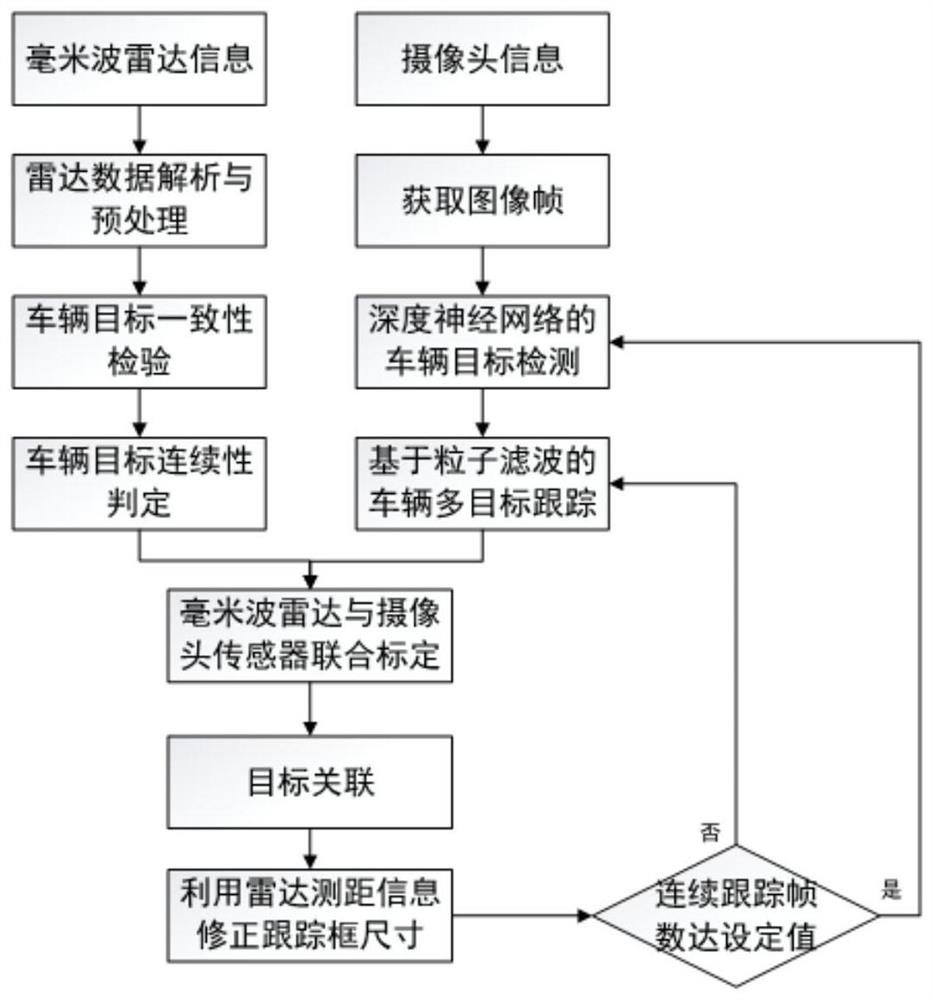
[0055] Such as figure 1 As shown, the present invention provides a kind of multi-vehicle target tracking method of fusion of machine vision and millimeter wave radar, comprising the following steps:
[0056] Obtain millimeter-wave radar detection data, filter the data, and obtain vehicle targets;
[0057] Obtain the road environment image, use the deep learning neural network model to detect the surrounding environment vehicles in the road environment image, and obtain the position information and size information of the visual tracking target;
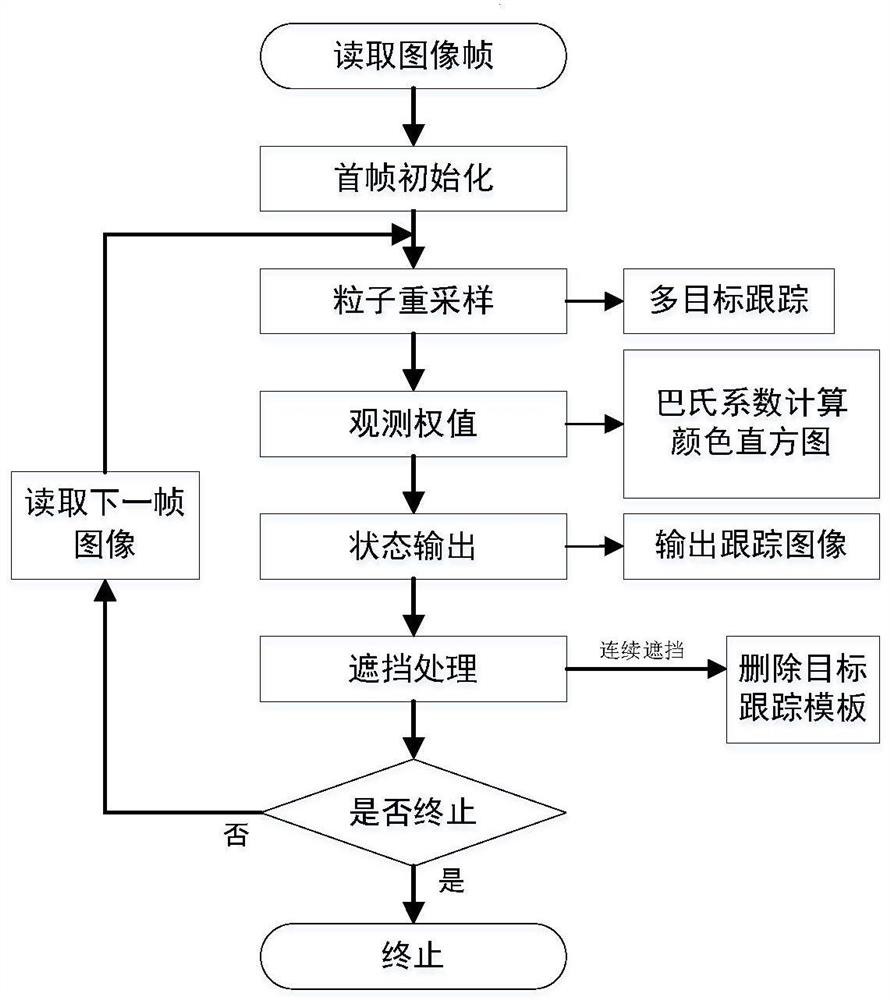
[0058] According to the position information and size information, the improved particle filter algorithm is used to track multiple targets in the visual image;
[0059] Using the machine vision and millimeter wave radar fusion model, associate the vehicle target with the visual tracking target according to the association decision strategy, and use the millimeter wave radar ranging information to correct the position and size of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More