

Unmanned mine card remote control driving system and method
A technology of remote control and driving method, which is applied in the field of unmanned driving of engineering vehicles, can solve the problems of poor remote control driving application effect of unmanned mining trucks, etc., and achieve high actual experience and reliability, improved stability, and good scalability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
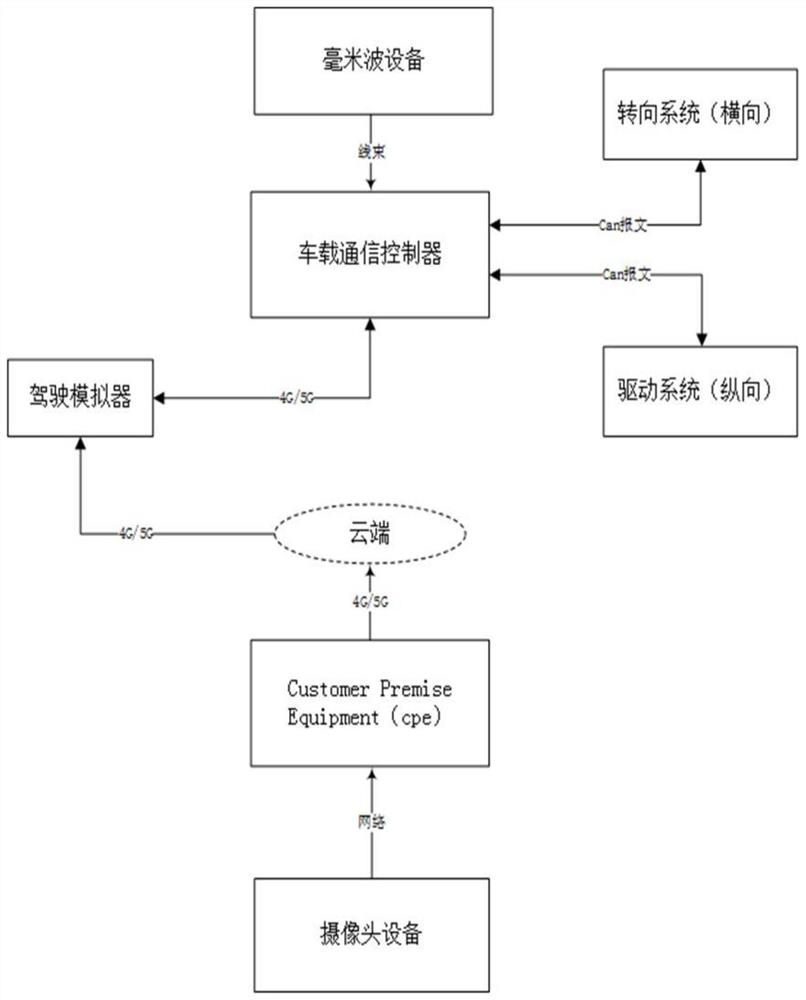
[0045] Such as figure 1 As shown: this embodiment discloses a remote control driving system for unmanned mining trucks: including a driving simulator and a vehicle terminal, wherein:
[0046] Driving simulator includes:
[0047] Industrial computer: receive and process relevant data, including video data, basic vehicle information, steering wheel information, accelerator and brake pedal values;
[0048] Human-computer interaction interface: as an integrated display of the remote control driving simulator, it displays relevant information of remote control driving and provides an operation interface;
[0049] Steering wheel: responsible for converting the driver's steering wheel action into digi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More