

Determination of time difference of arrival in distributed sensor networks
a sensor network and time difference technology, applied in direction finders, acoustic wave reradiation, instruments, etc., can solve the problems that the optimisation procedures and performance analyses carried out in the continuous-time framework cannot be fully applicable, and many known cross-correlation techniques based, explicitly or implicitly, on the assumption of signal stationarity and noise gaussianity are only of limited practical use, so as to reduce the amount of data required, reduce data transmission requirements, and simple bandwidth-
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
example 1
[0060]Assume that σn is the rms value of background noise with a rectangular frequency spectrum extending from 0 Hz to 2 kHz. If background noise has a Gaussian distribution, then the expected crossing rate achieves its maximum of 2310 crossings per second for L=0 i.e., the zero crossing rate. When the level L rises gradually to L=σn, L=2σn and L=3σn, the expected crossing rate will fall to 1340, 312 and 25 crossings per second. If L=4σn, then on average there will be less than one crossing per second.
[0061]Suppose now that the crossing level L has been set at L=4σn and that the detection crossing rate NDET(L) is equal to 1340 to achieve a very small value of the probability of false alarm. Assume also, for illustrative purposes, that an object-generated signal has the same rectangular spectrum as the background noise. In this case, a detection will be declared if the rms value σs of the signal is approximately at least four times larger than that of the noise.
[0062]The increased cr...
example 2
[0093]Assume that a signal being processed has a rectangular frequency spectrum extending from 0 Hz to 2 kHz.
[0094]If the signal is sampled only at 4 kHz, and each sample is represented by a 10-bit value, a signal segment of duration of 1 second will be represented by a set of 40,000 bits. This data set will have to be sent, via a suitable communication link, to a cross-correlator for TDOA determination.
[0095]As seen from Example 1, even for the lowest possible value of level L, i.e. L=0, the number of significant instants which need to be sent during 1-second interval is equal to 2310. A binary waveform representing those significant instants can be transmitted in a convenient manner by applying a bipolar phase or frequency modulation.
[0096]Therefore, mutual crosslation can use a simple modulation scheme in a communication link provided, for example, by a low-cost radio transceiver.
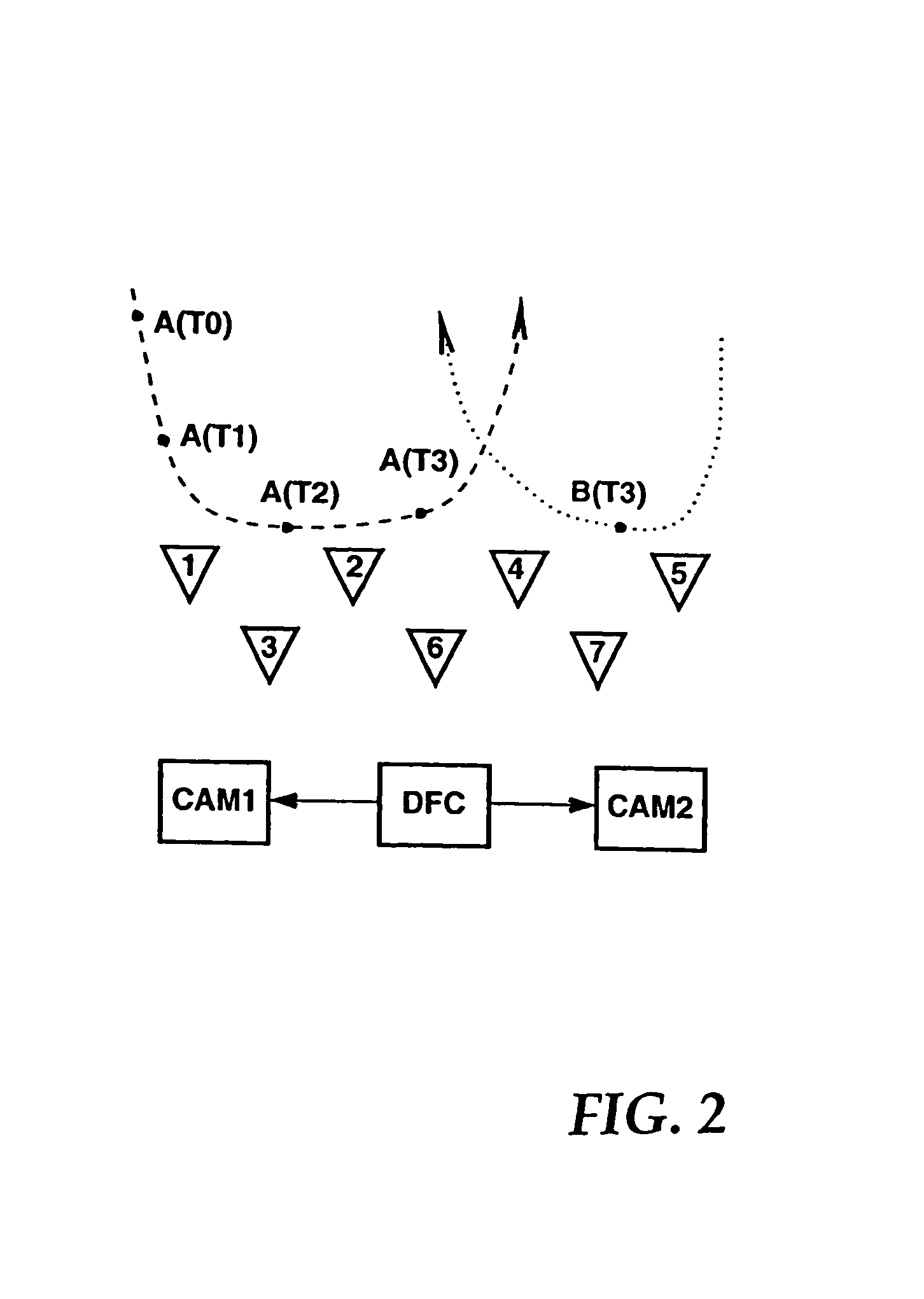
[0097]A data fusion centre DFC receives the following information:[0098]1. From each passive sensor d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More