Joint locking failure space manipulator halt optimizing method
A space manipulator and fault space technology, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve the problem of out-of-control of the manipulator due to the disturbing moment of the base, no consideration of whether the manipulator's motion ability meets the requirements of subsequent tasks, and the singularity of the manipulator Type and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0065] It should be clear that the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
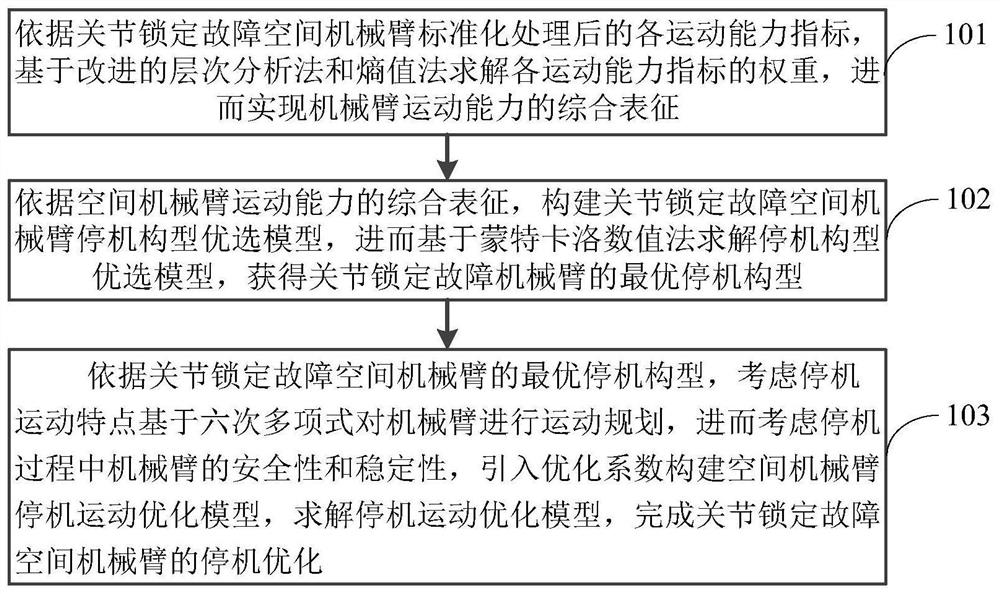
[0066] The embodiment of the present invention provides a joint locking fault space manipulator stop optimization method, please refer to figure 1 , which is a schematic flow chart of the method for optimizing the shutdown of the joint-locked fault space manipulator provided by the embodiment of the present invention, as shown in figure 1 As shown, the method includes the following steps:
[0067] Step 101 , standardize each movement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More