

Four-degree-of-freedom high-speed parallel robot with continuous rotation capability
A degree of freedom and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to realize infinite rotation, and achieve the effect of improving dynamic response quality and reducing wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are merely a part of the embodiments of the invention.
[0024] The technical solution to solve the above technical problem is:
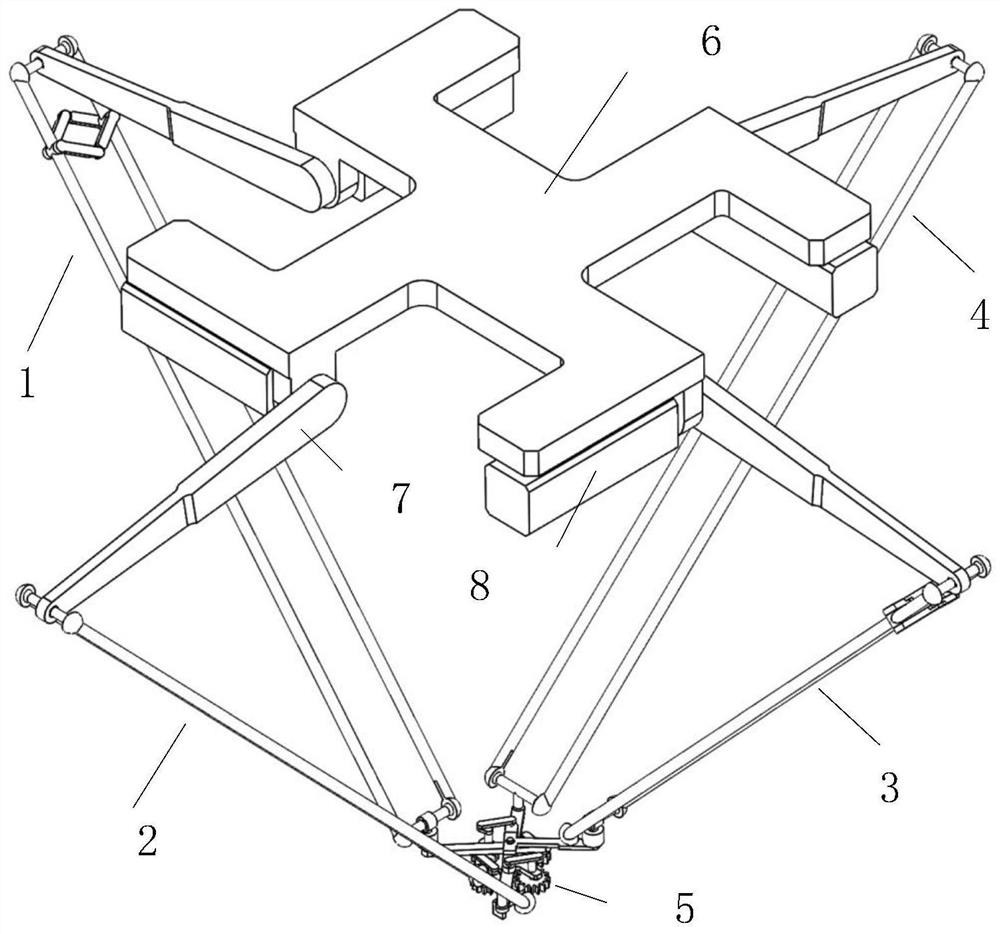
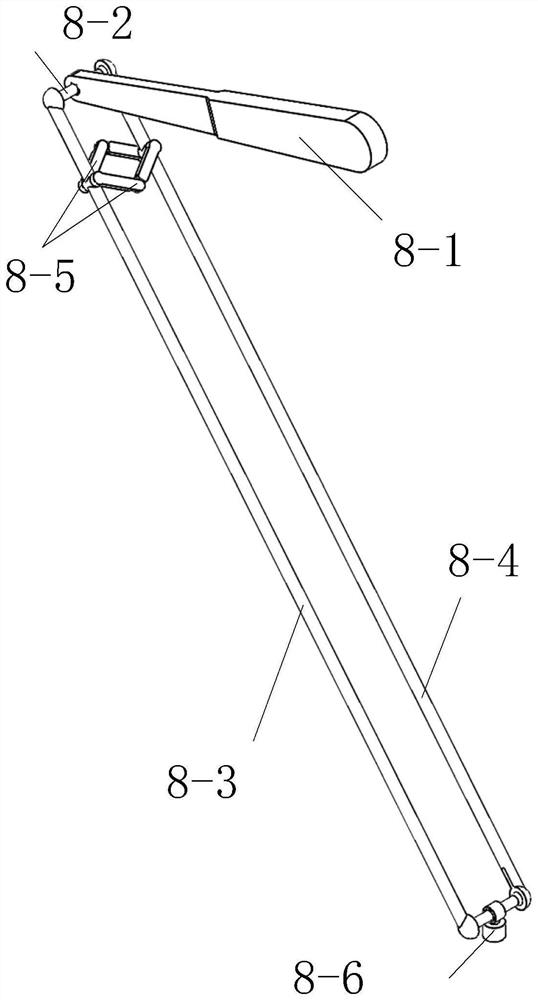
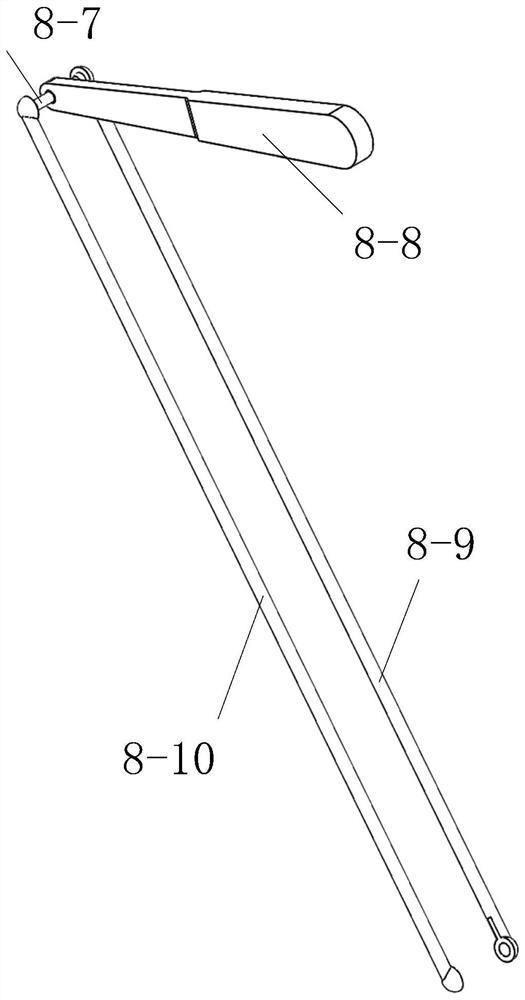
[0025] like Figure 1-11As shown, the present invention has a four-degree-freedom high-speed parallel robot having a continuous rotation capacity, which includes a platform, a movable platform, and a first strand, a second strand arranged between the platform and movable platform. , The third strand and fourth strand; four driving devices are arranged on the confinement platform; the first strand and the third strand structure are the same, and both include driving arms A, upper connecting rod A, Left link A, right link A, diamond chain and lower connecting rod A; one end of the drive arm A and the fixed platform by rotating the secondary connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More