

A spherical outer envelope capture method for space robots
A space robot and outer enveloping technology, which is applied in transportation and packaging, aerospace equipment, tools, etc., can solve problems such as complex deformation, limited tracking ability of manipulators, and difficult modeling of contact force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
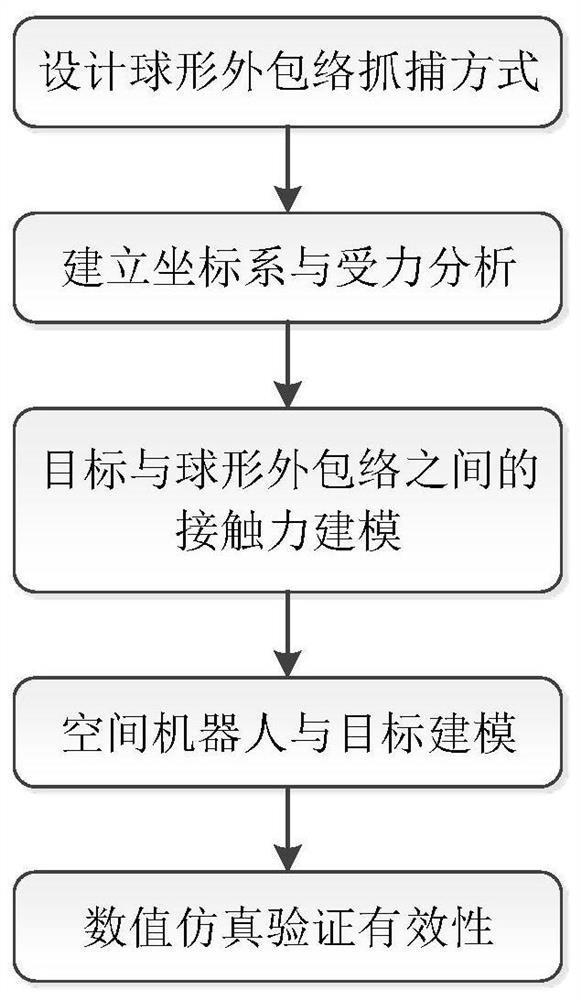
Method used
Image

Examples
Embodiment 1
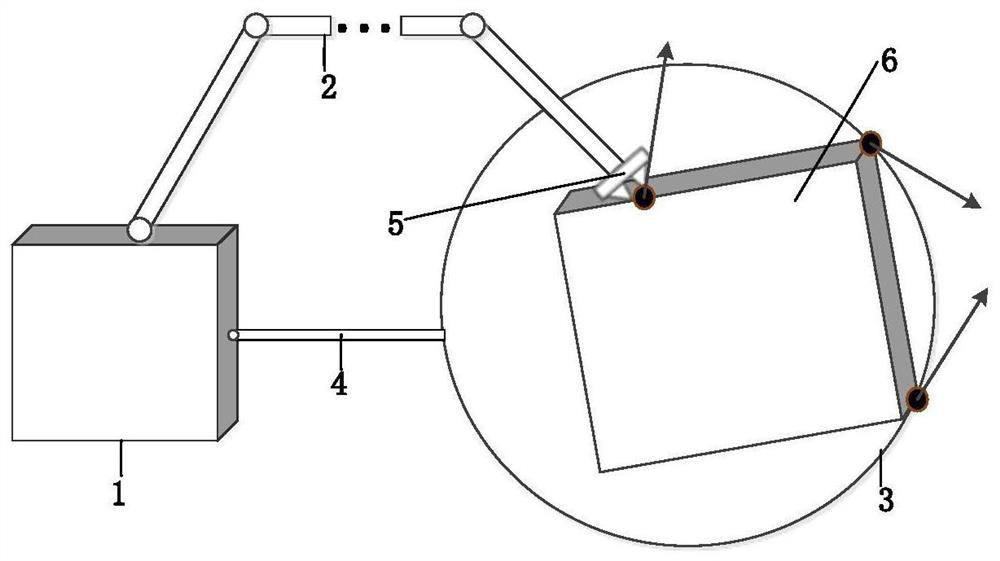
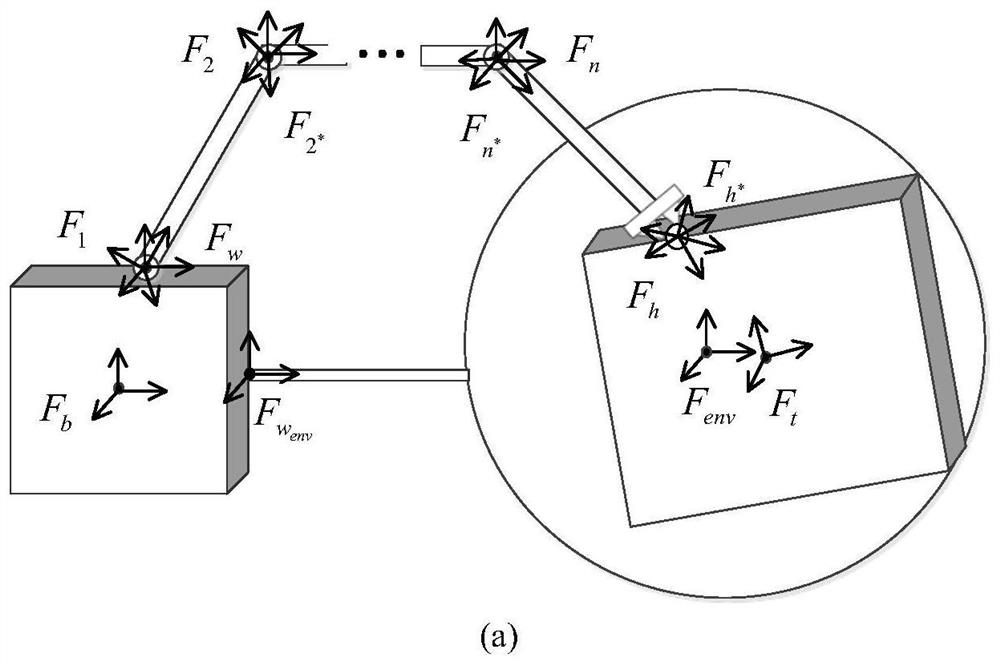
[0092] Taking a single-arm space robot with a spherical outer envelope and a free-rolling target as the research objects, the target captured by the manipulator is analyzed to verify the effectiveness of the method of the present invention.
[0093] Regardless of the mass of the spherical outer envelope and the lightweight rod, the space robot and the target body are regarded as rigid bodies, then the geometric characteristics of the spherical outer envelope and the target body designed in step S1 are shown in Table 1, and the spherical outer envelope The position of the center relative to the spacecraft platform is b p env =[0 0 6.8] T ; In step S2, the mechanical arm of the space robot has 7 single-degree-of-freedom rotary joints, that is, 7 arms.
[0094] Table 1 Spherical envelope and target geometric properties
[0095]
[0096] The mass inertia characteristics of the spacecraft platform and the target body are shown in Table 2.
[0097] Table 2 Spacecraft platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More