

3D sorting logistics robot
A logistics robot and 3D technology, applied in the field of 3D picking logistics robots, can solve the problems of low efficiency, limited working efficiency and working height, and low shelf handling efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further elaborated below in conjunction with embodiment.
[0031] In order to improve the deficiency of the technical level of the above-mentioned logistics equipment, the present invention provides a 3D operation logistics robot that takes into account the horizontal movement of the ground and the vertical climbing of the shelves. Input costs to meet the needs of densification, flexibility and intelligence.
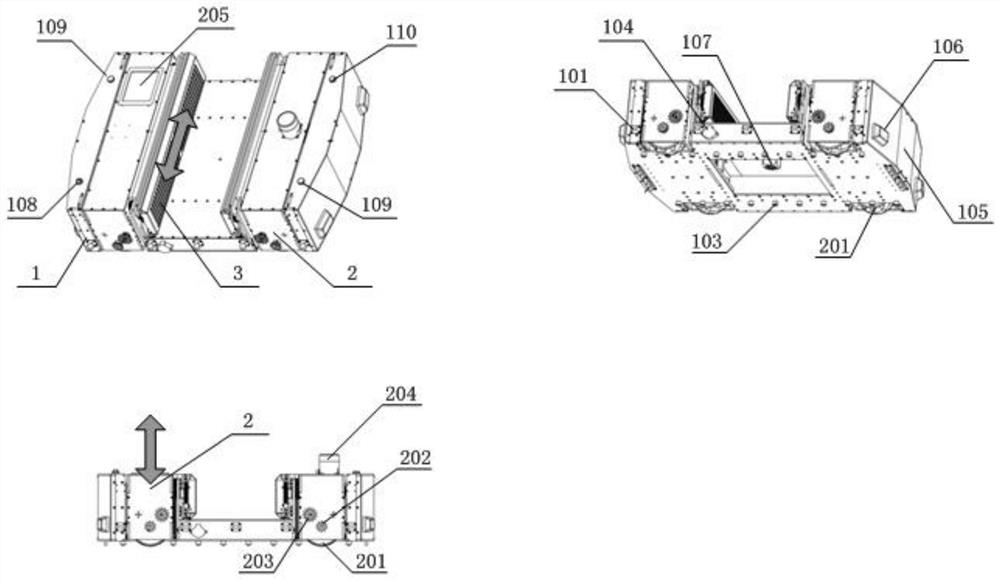
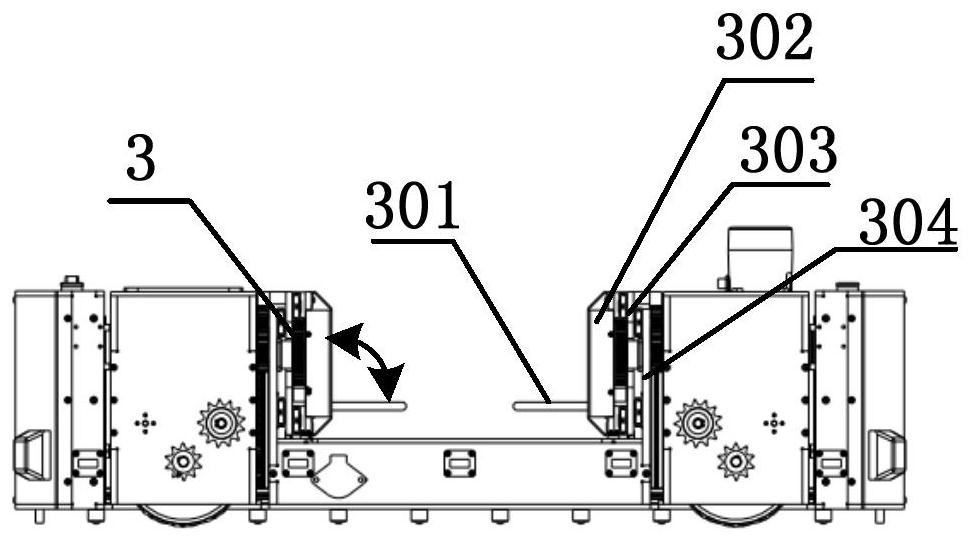
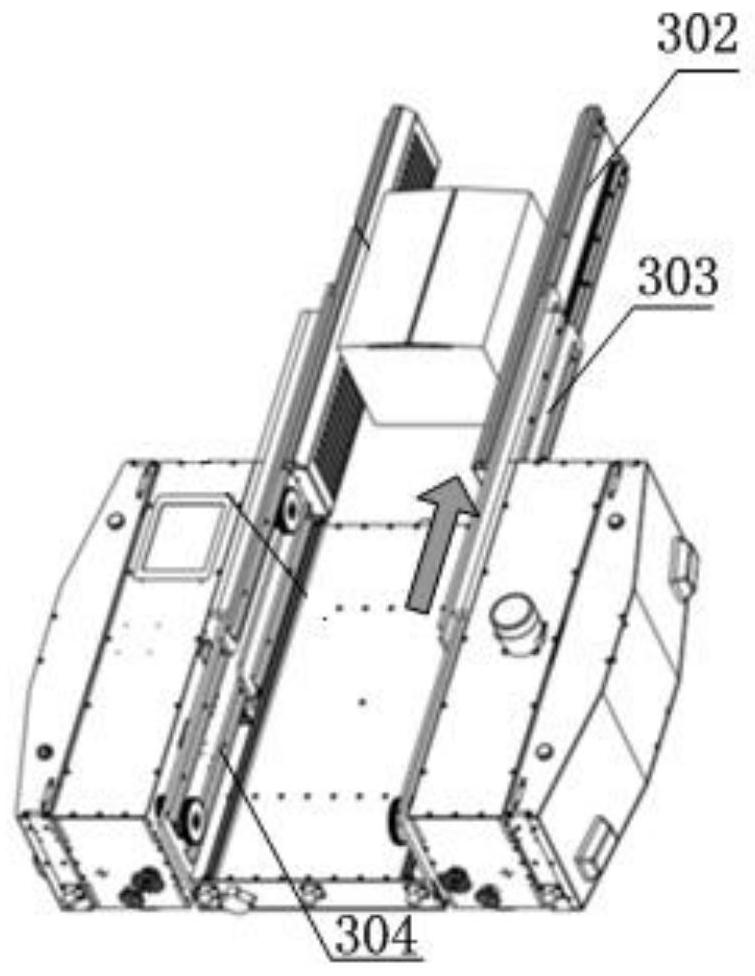
[0032] 3D operation logistics robot, such as figure 1As shown, it includes a load-bearing body 1, two vertical climbing power bodies 2, a fork 3 and a shelf 4; the two vertical climbing power bodies 2 are symmetrically arranged at the front and rear of the load-bearing body 1, and pass through the linear slide rail Connected with the body, it can move along the vertical direction of the carrying body 1 for the engagement and release of the climbing mechanism with the climbing body. The internal integrated compound motion components t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More