

Multi-UAV/UGV collaborative long-term operation path planning method based on multi-objective optimization
A multi-objective optimization and path planning technology, applied in navigation, instrumentation, surveying and navigation, etc., can solve problems such as lack of heuristic direct solution algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0127] The present invention will be further described below in conjunction with the accompanying drawings.
[0128] As shown in the attached picture: multi-UAV / UGV collaborative long-term operation path planning method based on multi-objective optimization, multi-objective optimization multi-UAV / UGV collaborative long-term operation path planning method is as follows:
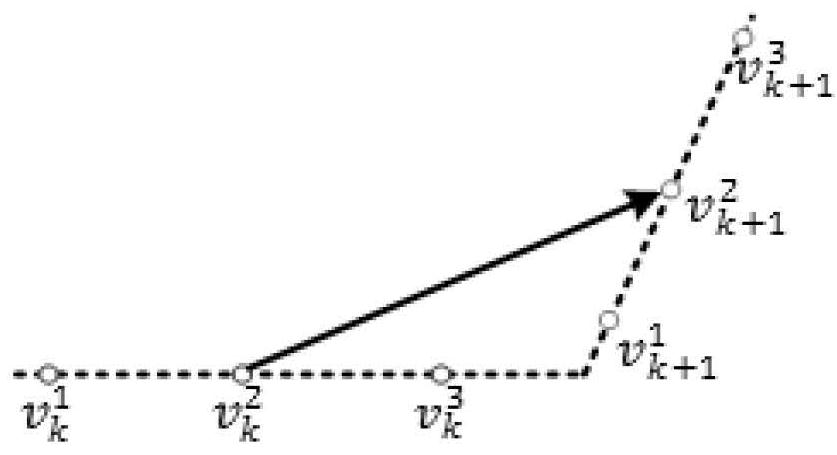
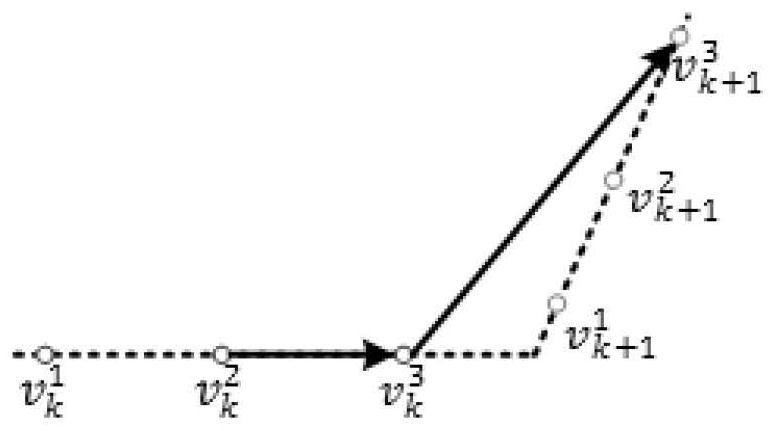
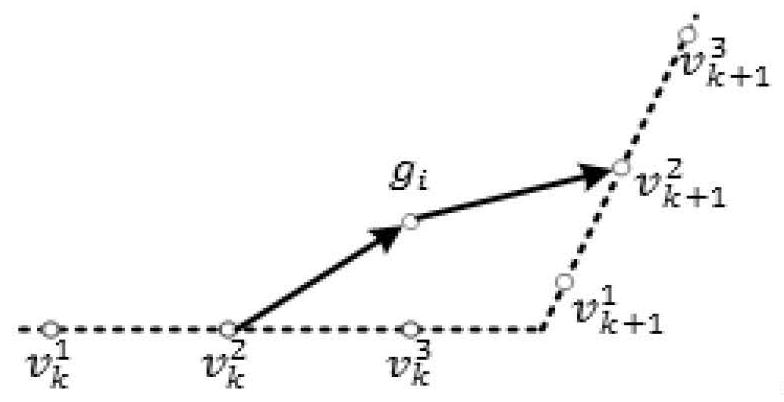
[0129] (1) The graph construction method of the multi-task fixed charging point problem, which converts the multi-task fixed charging point problem into a traveling salesman problem for solving; the graph construction method of the multi-task discrete charging point problem, and uses a graph conversion algorithm , transforming the multi-task discrete charging point problem into an equivalent generalized traveling salesman problem for solving; the solution speed of the multi-task fixed charging point problem is faster than that of the multi-task discrete charging point problem, and the multi-task discrete chargi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More