

Path planning method combining dynamic step RRT* algorithm and potential field method
A technology of path planning and dynamic step size, which is applied in navigation computing tools, road network navigators, measuring devices, etc., can solve the problem of expansion without guiding function, solve the contradiction between real-time and smoothness, and reduce redundancy The effect of redundant channels and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
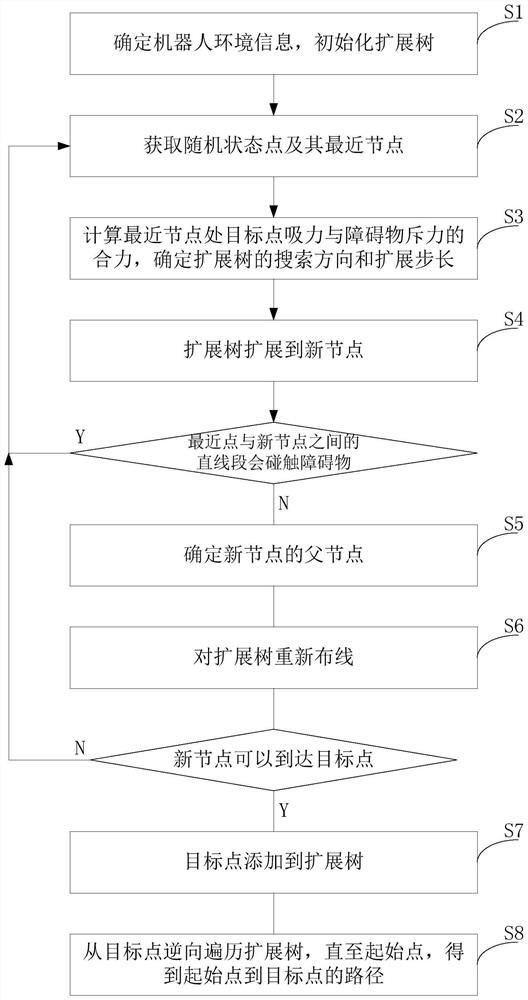
[0050] The invention discloses a path planning method combining the dynamic step size RRT* algorithm and the potential field method, such as figure 1 shown, including:
[0051] S1. Determine the position coordinates of the starting point q_start and the target point q_Goal of the robot, determine the position and contour of the obstacle; determine the RRT* reference step length ε; in this embodiment, set ε=5;
[0052] If the straight line path from q_start to q_Goal does not touch obstacles, the planned path is a straight line segment from q_start to q_Goal; otherwise, the starting point q_start of the robot is used as the root node of the extended tree in the RRT* algorithm, according to step S2- S8 determines the planning path:
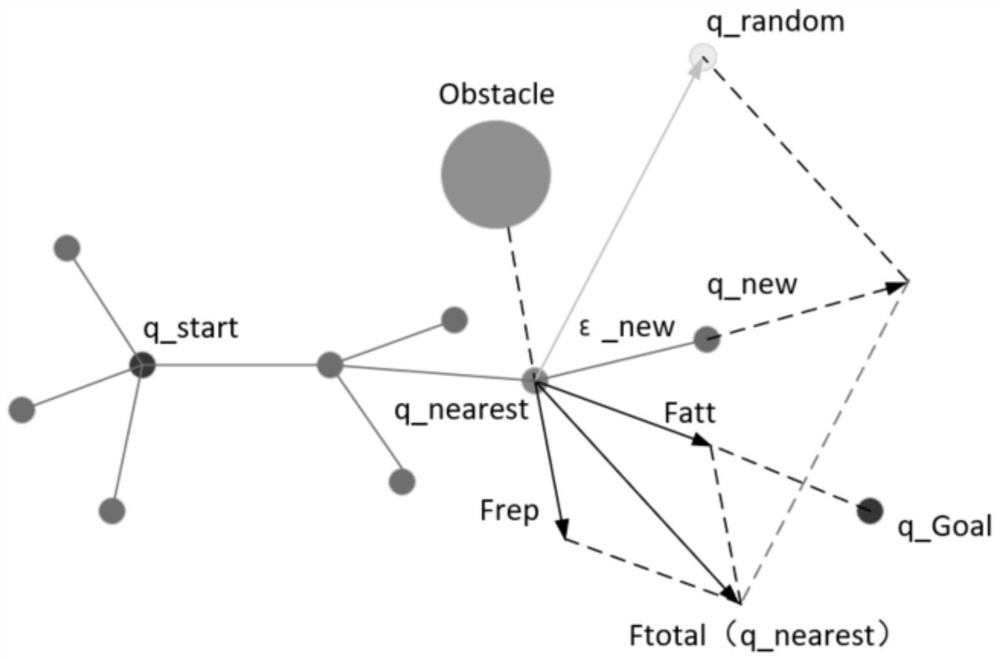
[0053] S2. Obtain a random state point q_random by random sampling in the robot motion area, and search for the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More