Unmanned aerial vehicle route planning method based on safety cost evaluation
A route planning and UAV technology, applied in the field of UAV route planning based on safety cost assessment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the following embodiments in no way limit the present invention.
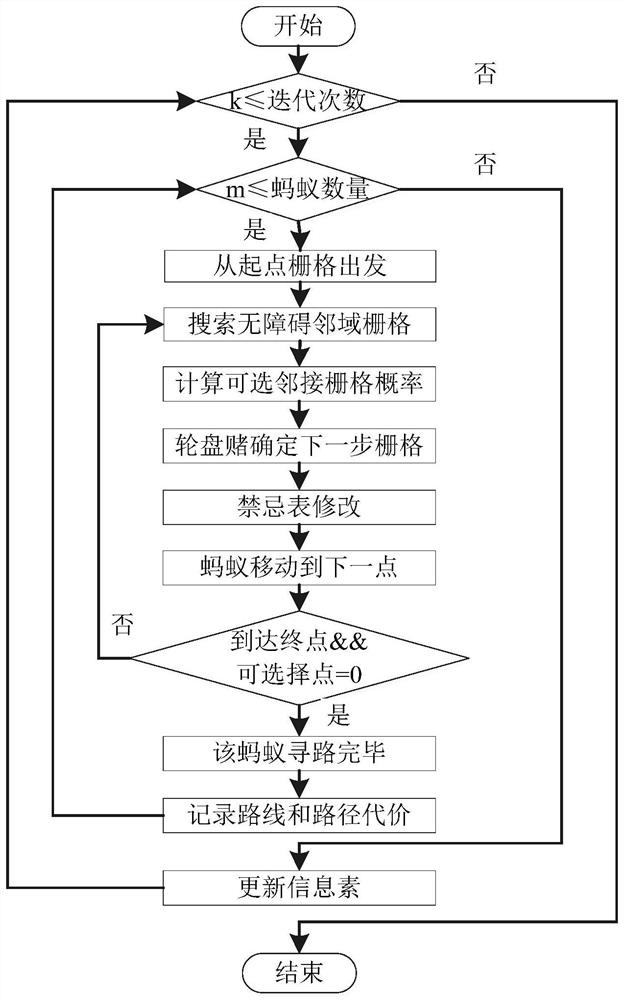
[0056] Such as figure 1 As shown, the UAV route planning method based on safety cost assessment provided by the present invention includes the following steps in order:
[0057] 1) Rasterize the ground projection of the UAV flight airspace to obtain multiple square grids;
[0058] The flight airspace of drones is determined according to the mission scope of its flight operations, and the ground projection of the flight airspace is represented by latitude and longitude coordinates in the map.
[0059] The rasterization of the ground projection of the UAV flight airspace is to divide the two-dimensional space formed by the ground projection into multiple square grids. The side length of the grid is determined by the type and design size of the drone.
[0060] The types of dro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More