

Distance-based closed-loop detection method, device, electronic device and storage medium
A closed-loop detection and distance technology, used in character and pattern recognition, image analysis, instruments, etc., can solve the problems of reduced positioning efficiency and accuracy, lack of purpose and stability, and increased matching consumption, and achieve enhanced efficiency and accuracy. , Constrain the construction to be stable and reliable, and reduce the effect of computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
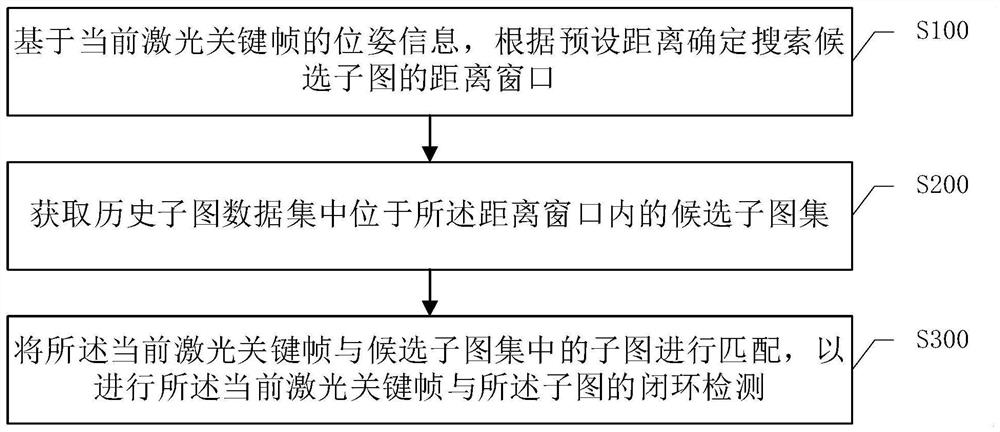
[0054] An embodiment of the present invention, such as figure 1 As shown, a distance-based closed-loop detection method includes:
[0055] S100 , based on the pose information of the current laser key frame, and according to a preset distance, determine a distance window for searching for candidate sub-images.
[0056] Specifically, in this embodiment, the key frame refers to a frame of laser data, the preset distance is the distance set according to the requirements of closed-loop detection, and the distance window is specifically the pose of the current laser key frame as the center node, with the preset distance as the center node. Set the distance as a circular area with a radius, such as a circular area with a range of 5m.
[0057] S200 acquires the candidate sub-atlas within the distance window in the historical sub-graph data set.
[0058] In this embodiment, the sub-image is a local map formed by a certain number of laser key frames, and the historical sub-image data s...
Embodiment 2
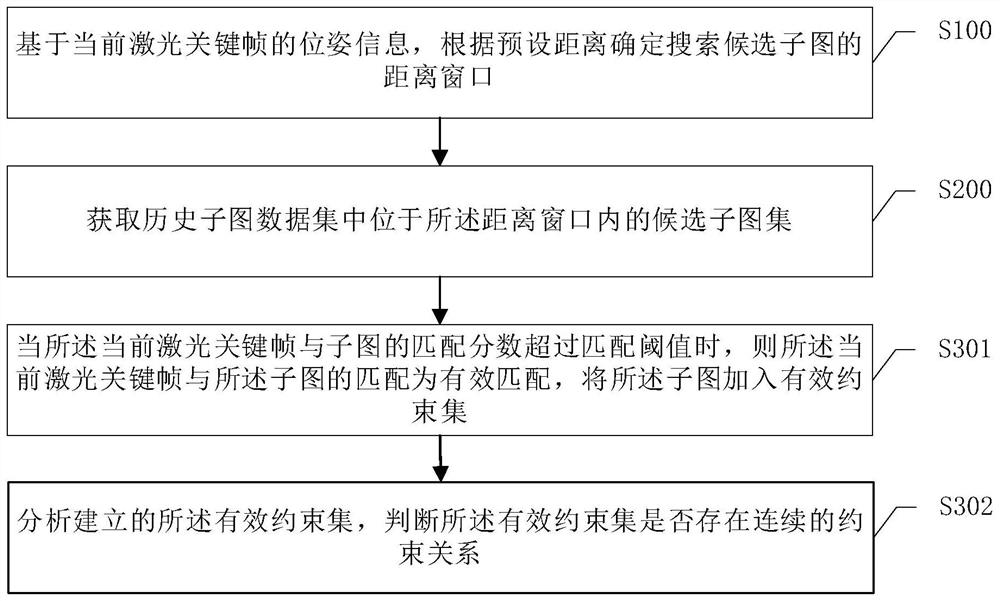
[0063] An embodiment of the present invention, such as figure 1 As shown, a distance-based closed-loop detection method includes:
[0064] S100 , based on the pose information of the current laser key frame, and according to a preset distance, determine a distance window for searching for candidate sub-images.
[0065] Specifically, in this embodiment, the key frame refers to a frame of laser data, the preset distance is the distance set according to the requirements of closed-loop detection, and the distance window is specifically the pose of the current laser key frame as the center node, with the preset distance as the center node. Set the distance as a circular area with a radius, such as a circular area with a range of 5m.
[0066] S200 acquires the candidate sub-atlas within the distance window in the historical sub-graph data set.
[0067] In this embodiment, the sub-image is a local map formed by a certain number of laser key frames, and the historical sub-image data...
Embodiment 3
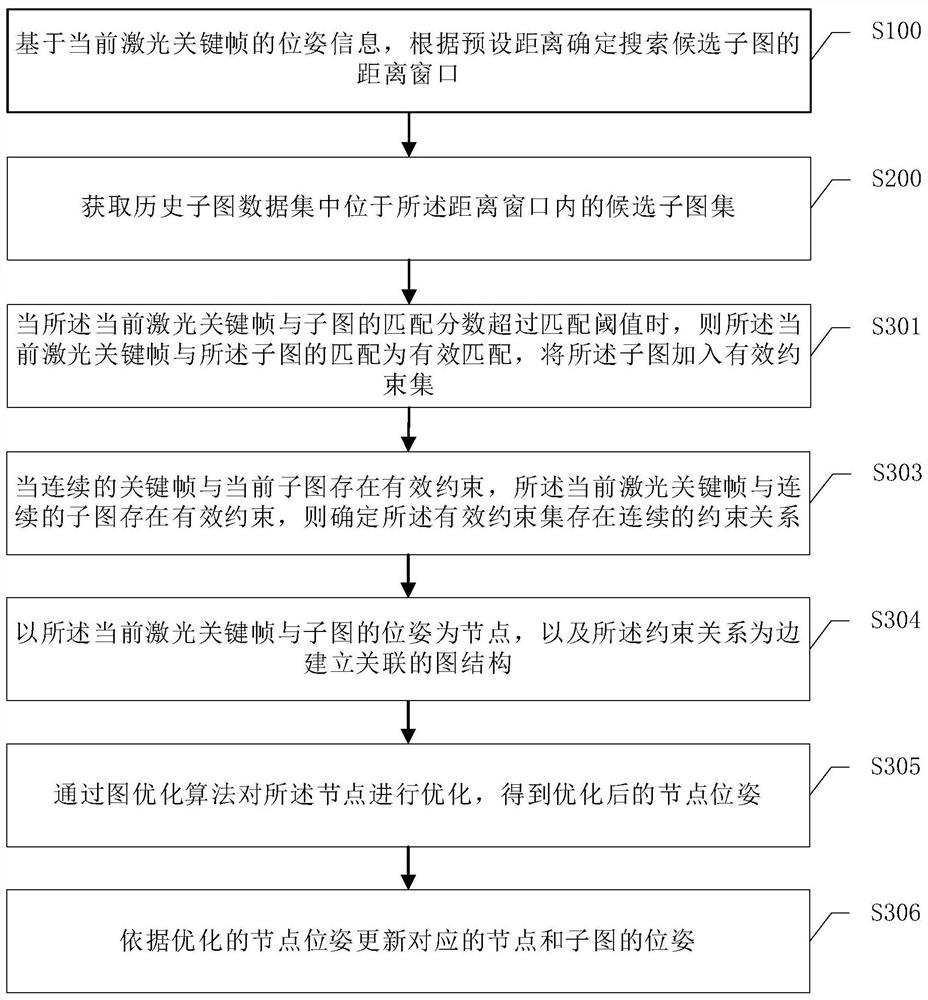
[0074] An embodiment of the present invention, such as figure 1 As shown, a distance-based closed-loop detection method includes:
[0075] S100 , based on the pose information of the current laser key frame, and according to a preset distance, determine a distance window for searching for candidate sub-images.
[0076] Specifically, in this embodiment, the key frame refers to a frame of laser data, the preset distance is the distance set according to the requirements of closed-loop detection, and the distance window is specifically the pose of the current laser key frame as the center node, with the preset distance as the center node. Set the distance as a circular area with a radius, such as a circular area with a range of 5m.
[0077] S200 acquires the candidate sub-atlas within the distance window in the historical sub-graph data set.
[0078] In this embodiment, the sub-image is a local map formed by a certain number of laser key frames, and the historical sub-image data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More