

Visual odometer construction method in robot visual navigation
A visual odometry and robot vision technology, which is applied in the field of visual odometry construction in robot visual navigation, can solve the problems of feature point mismatch, poor robustness and accuracy, and affect positioning accuracy and mapping accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
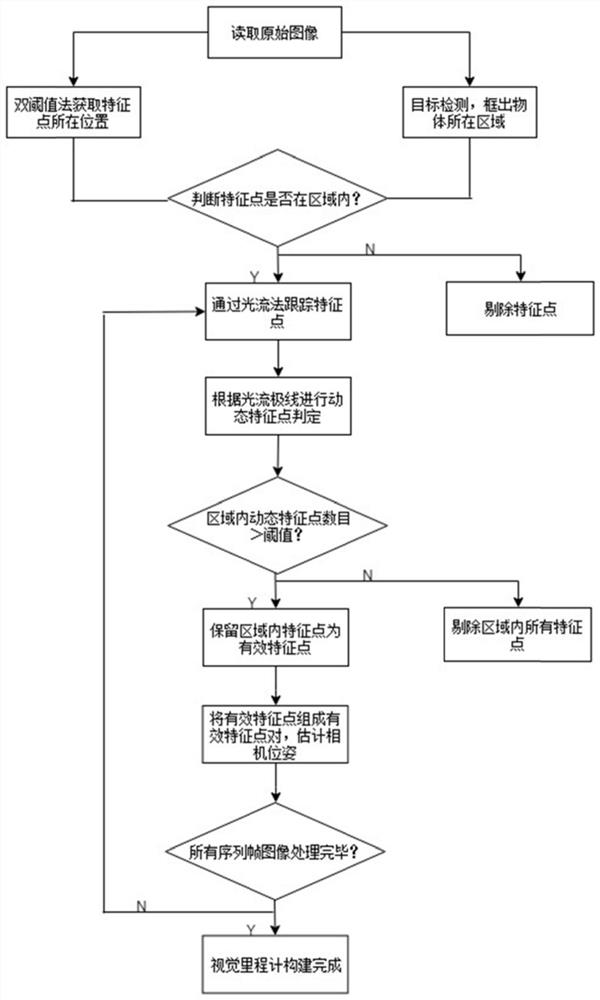
[0068] Such as figure 1 As shown, the present invention discloses a method for constructing a visual odometer in robot visual navigation, comprising the following steps:
[0069] Step 1, read the original image, extract the feature points and obtain the position of the feature points through the double threshold method;
[0070] Step 2, perform target detection on the original image through the YOLOv3 algorithm, and obtain the position of the bounding box of the object; image 3 Shown is the target detection result map, which respectively frame the bounding boxes of tricycles, pedestrians, and cars.
[0071] Step 3, according to the position of the feature point and the position of the object bounding box, judge whether the feature point is in the object bounding box, remove the feature points not in the object bounding box, and obtain the feature points in the object bounding box;
[0072] Step 4, performing optical flow tracking on the feature points in the bounding box of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More