

Multi-isomorphic unmanned vehicle distributed task allocation method for reconnaissance tasks
A technology of distributed tasks and task allocation, applied in data processing applications, instruments, computing, etc., can solve the problems of unmanned vehicles without building a stable communication structure, unable to adapt well to unmanned vehicle systems, and not considering environmental factors. , to avoid task conflicts and omissions, improve invulnerability and autonomy, and avoid local optimal solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below with reference to the accompanying drawings and examples.
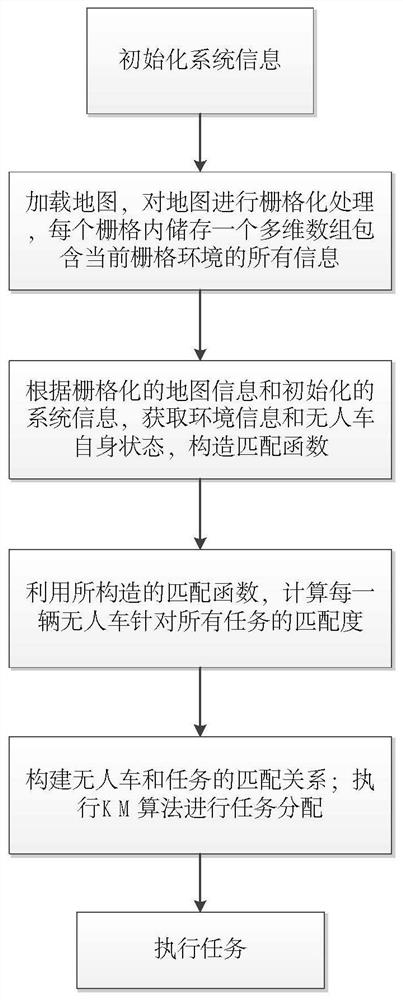
[0042] The reconnaissance mission is a particularly important link in the combat process. Due to the different status, mission requirements and environmental constraints of the unmanned vehicle, each unmanned vehicle has different evaluations on the same task point. In the present invention, it is assumed that all ground unmanned vehicles are isomorphic intelligent bodies, loaded with the same equipment, but have different upper limit values of capability values, and the environment for performing tasks is outdoors in the city. The characteristics of the reconnaissance mission are as follows: each mission point needs to be completed quickly and efficiently; the efficiency of completing the reconnaissance mission must be maximized. Combine the characteristics of reconnaissance missions for task assignment.
[0043] The problem proposed by the present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More