

Man-machine game control method and system for upper limb wearable robot
A control method and technology of robots, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as high cognitive load, reduce performance, etc., to achieve the effect of improving efficiency, reducing complexity, and solving single problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0102] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
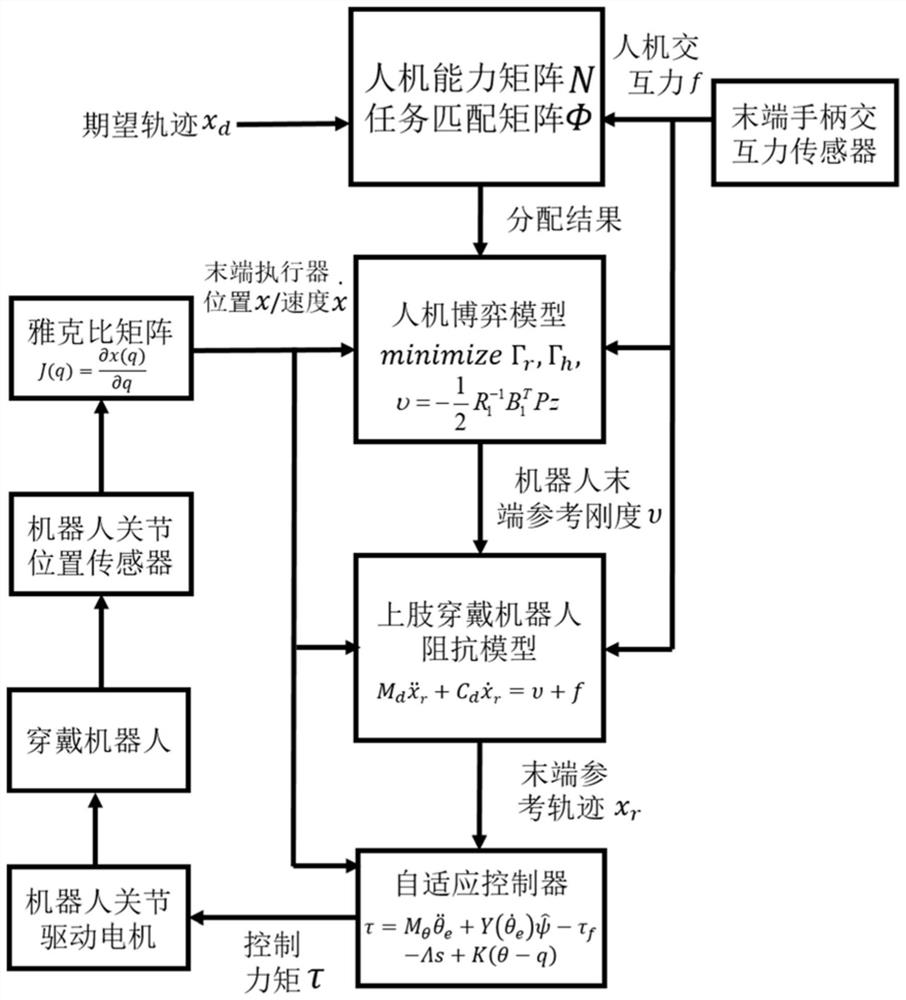
[0103] A human-machine game control method for an upper-limb wearable robot provided according to the present invention comprises the following steps:
[0104] Step S1: Use the end handle interactive force sensor to record the end point force data of the user's upper limbs in real time during the task, and establish the capability matrix and task matching matrix for each basic task of the user and the upper limb-wearing robot. Each basic task is Assign tasks according to the capability matrix and task m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More