Wall building control method and system
A control method and control system technology, applied in the field of wall-building control methods and control systems, to achieve the effects of small stacking errors and high wall quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
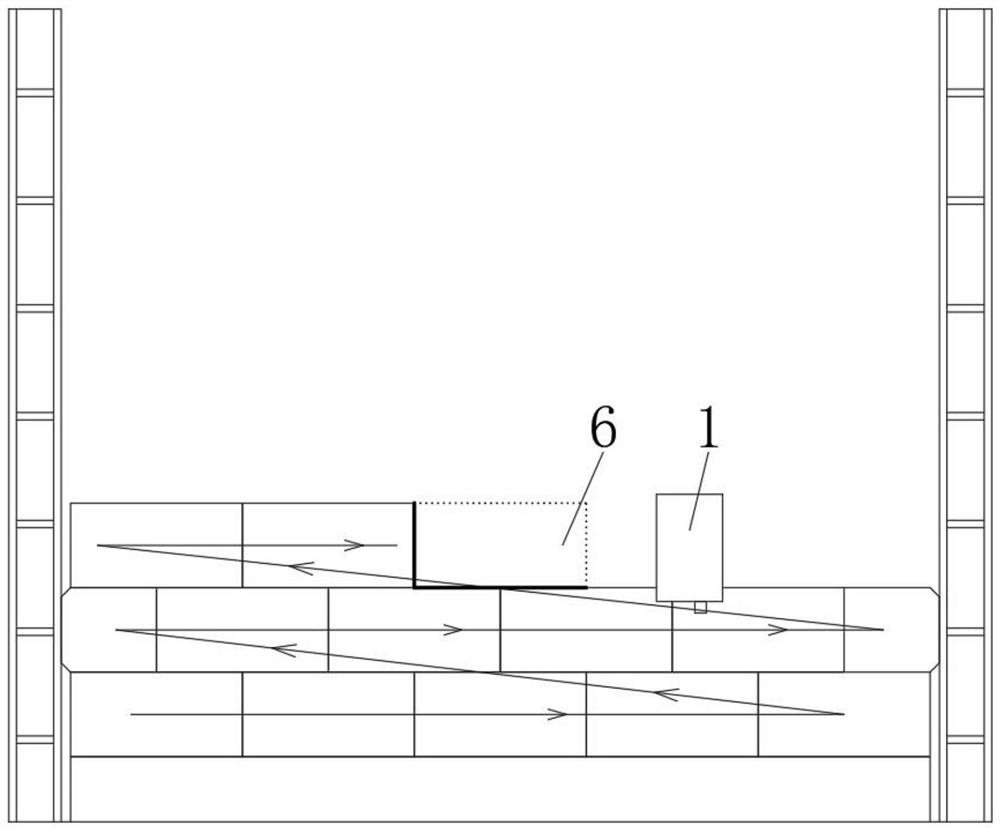
[0044] Such as figure 2 As shown, in this embodiment, the order of stacking bricks is stacked layer by layer from left to right or from right to left.
[0045] Before starting masonry, calculate the length and height of the wall, calculate the number of brick layers required for the wall to be built according to the height of the wall to be built, and calculate the number of brick layers required for the wall to be built according to the length of the wall to be built and the type of bricks used for the wall to be built Determine the number of bricks needed for each brick layer.
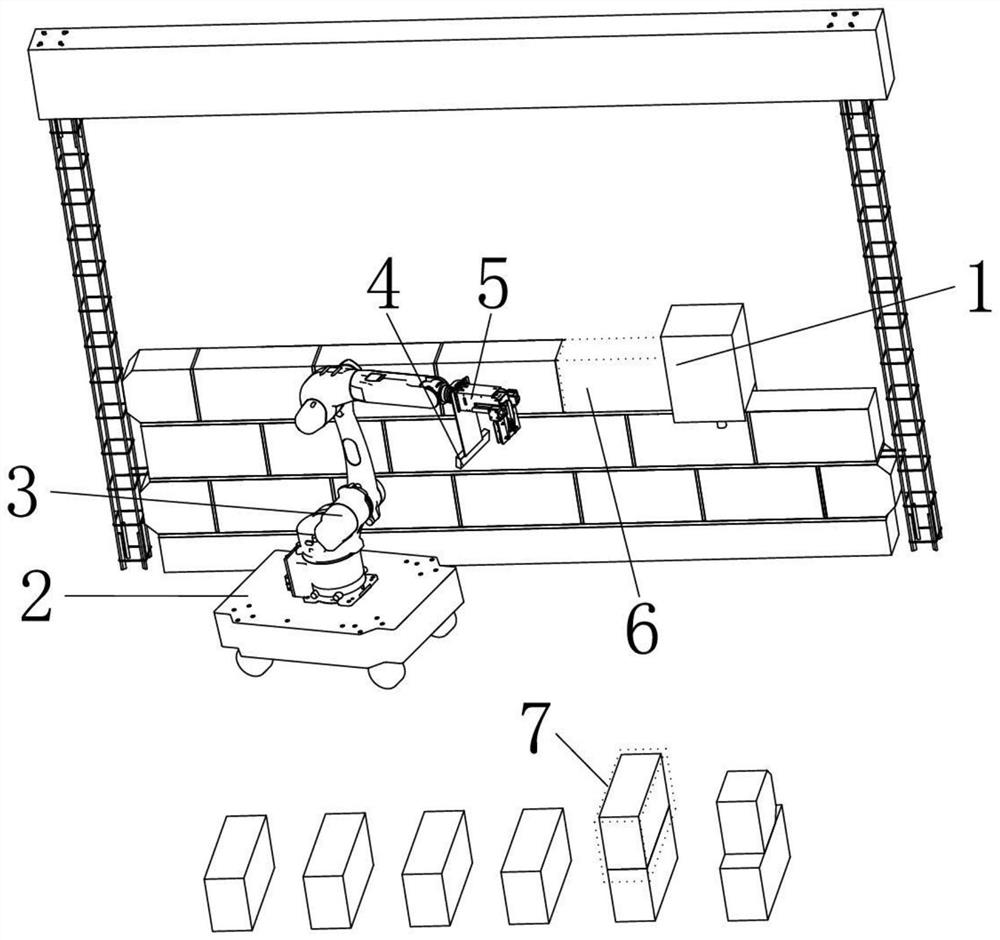
[0046] Create a picture file of the wall to be built, each brick corresponds to a brick placement position, and define a brick placement position to be built as the brick placement position to be built. By establishing the picture file of the wall to be built, it is assumed that there are n brick placement positions 6 for the wall to be built according to the order of bricks, n is a positive intege...
Embodiment 2
[0060] Such as Figure 4 As shown, in this embodiment, the order of stacking bricks is stacked according to the area. For the convenience of introduction, the area is divided into the first area 80, the second area 81 and the third area 82 according to the order of masonry.
[0061] Before starting to build the wall, obtain the length and height of the wall, calculate the number of brick layers required for the wall to be built according to the height of the wall to be built, and calculate the number of brick layers required for the wall to be built according to the length of the wall to be built and the type of bricks used for the wall to be built Determine the number of bricks needed for each brick layer. And establish the picture file of the wall body to be built, generate several brick placement positions, and define a brick placement position to be built as the brick placement position to be built. By establishing the picture file of the wall to be built, it is assumed t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com