

Double-pendulum crane sliding mode control method based on load swing state observation
A load swing and state observation technology, applied in the direction of adaptive control, load suspension components, general control system, etc., can solve the problems of sensor installation, application constraints, cost increase, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
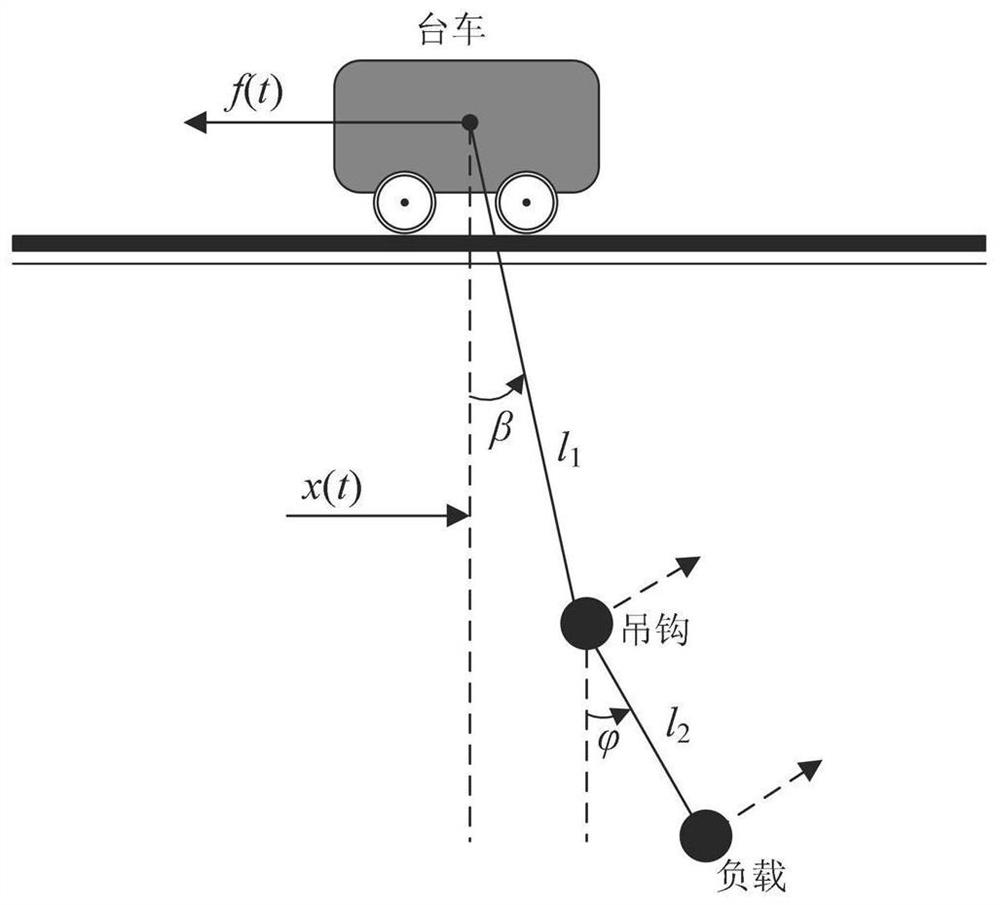
[0043] The present invention discloses a sliding mode control method for double pendulum cranes based on load swing state observation. The basic idea is: firstly, the coupling relationship between swing angles is deduced according to the dynamic model of double pendulum cranes, and then the linear expansion state observation is designed. The LESO observes the swing state of the load and feeds it back to the sliding mode controller to obtain the anti-swing positioning controller of the double pendulum crane. Specifically follow the steps below:
[0044] Step A. Transform the dynamic model of the double pendulum crane to obtain the dynamic coupling relationship between the swing of the hook and the swing of the load:
[0045] accordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More