Mobile robot autonomous exploration method fusing path information richness
A mobile robot and path information technology, applied in vehicle position/route/height control, instrument, non-electric variable control, etc., can solve the problems of not considering environmental information, perception uncertainty, and robot positioning uncertainty increase, etc. Achieve the effect of improving exploration efficiency and reducing perception uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041]The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
[0042] In the description of the present invention, it should be understood that the term "comprising" is intended to cover a non-exclusive inclusion, such as a process, method, system, product or device that includes a series of steps or units, and is not limited to the listed Instead, the steps or elements optionally also include steps or elements that are not listed, or optionally also include other steps or elements that are inherent to the process, method, product or apparatus.
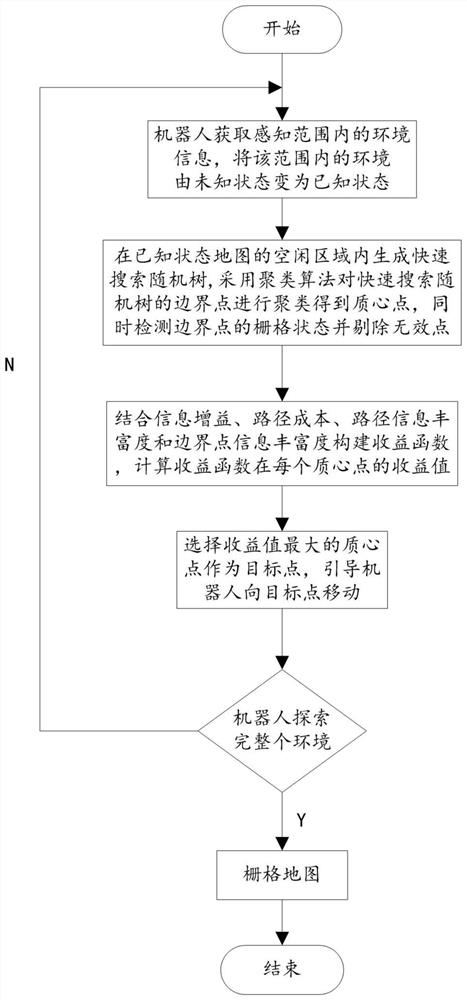
[0043] refer to figure 1 As shown in the flowchart, an embodiment of a method for autonomous exploration of a mobile robot that integrates the richness of path information in the present invention inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More