

Variable gain-based supercoiled sliding mode control method
A control method and super-helical technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve problems that affect robustness, aggravate control input chatter, etc., and achieve improved response speed, robustness suppression, and chatter suppression shock effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
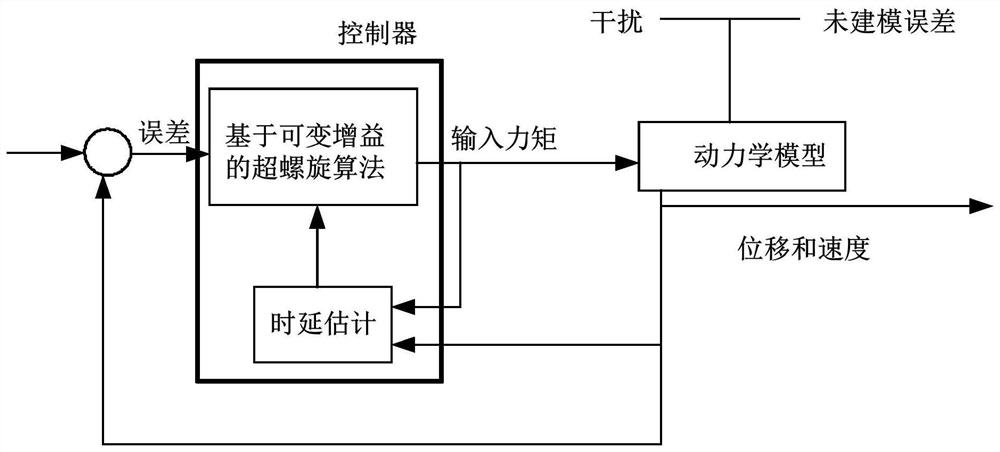
[0052] The invention discloses a superhelical sliding mode control method based on variable gain, which is mainly applied to the control of multi-axis systems such as manipulators; the gain of the power term in the general superhelical algorithm is redesigned as a variable gain, and the new gain is used as The output of the first-order system is proportionally increased by the absolute value of the sliding mode function, and the limited function is used as the input signal of the first-order system, and the sharp change degree of the input signal is smoothed by using its low-pass filtering characteristics. The new gain has the following advantages: when the system state ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More