Unmanned vehicle brake system fault diagnosis method based on Bayesian network
A technology of Bayesian network and braking system, which is applied in the field of fault diagnosis of unmanned vehicle braking system based on Bayesian network, which can solve the problem of imprecise knowledge expression of diagnostic object testing means, and it is difficult to determine the true fault Reasons, strong randomness and uncertainty, etc., to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0046] see Figure 1-5 , the present invention provides a technical solution:
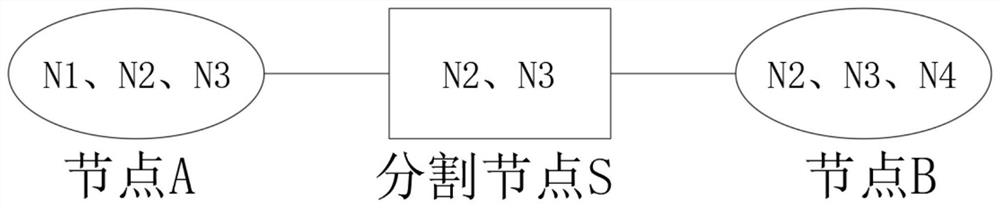
[0047] A fault diagnosis method for the braking system of unmanned vehicles based on the Bayesian network, when performing Bayesian network fault analysis on the unmanned braking system, the probabilistic reasoning method using the group tree propagation algorithm, the group tree propagation reasoning algorithm Convert the Bayesian network into a clique tree, and then pass the message to each node in the clique tree at one time through message passing, and finally make the clique tree satisfy the global consistency.
[0048] When the Bayesian network is changed into an undirected group tree structure, the following steps are included:
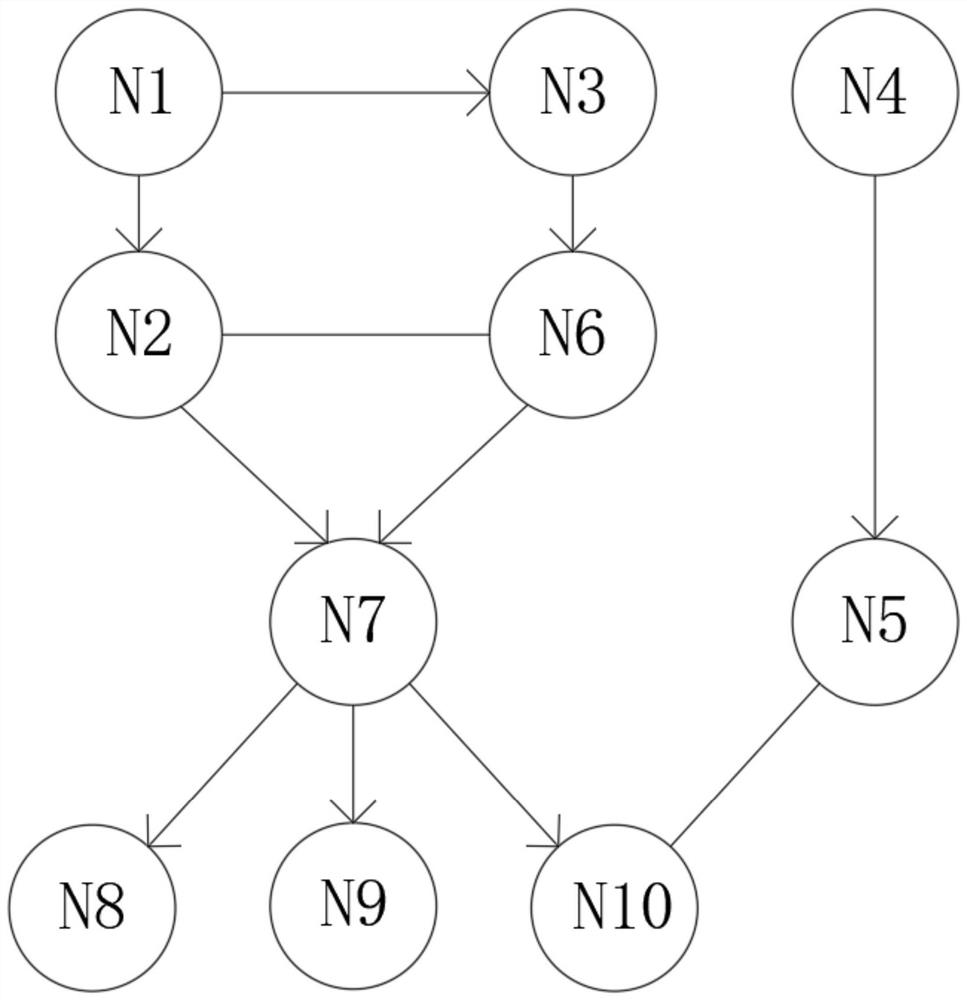
[0049] Step 1: Construct a correct graph, connect nodes with common children in the Bayesian network graph with an undirected edge, and then adjust all directed edges in the Bayesian network to undirected edges;
[0050] Step 2: Triangulate the graph by adding edg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More