

Control method, control system and engineering vehicle for parallel positioning of construction vehicles
A technology of engineering vehicles and control methods, which is applied in the direction of control devices, etc., can solve the problems of difficult and accurate judgment of vehicle trajectory, many times of starting and stopping of road rollers, and high energy consumption of road rollers, so as to reduce overall energy consumption and wear of vehicle components, and improve construction efficiency. Efficiency, avoiding the effect of start-stop action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
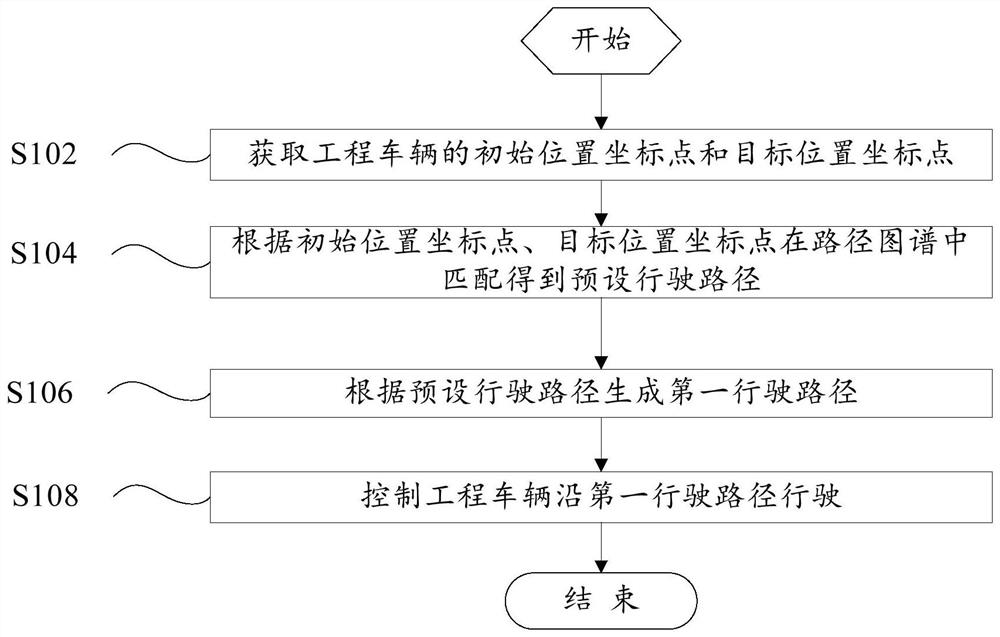
[0056] Such as figure 1 As shown, in one embodiment of the present invention, a kind of control method of engineering vehicle parallel position is provided, comprising:
[0057] S102, acquiring the initial position coordinate point and the target position coordinate point of the engineering vehicle;
[0058] S104, matching the initial position coordinate point and the target position coordinate point in the route map to obtain a preset driving route;
[0059] S106, generating a first driving route according to a preset driving route;
[0060] S108. Control the construction vehicle to travel along the first travel path.
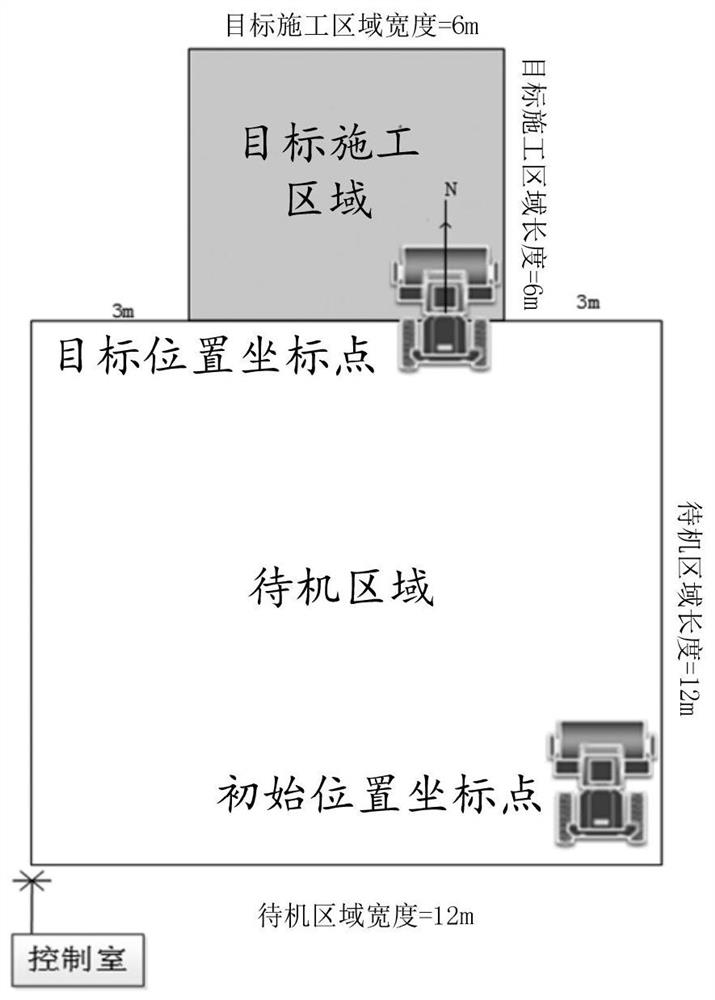
[0061] The control method of the construction vehicle provided in this embodiment first obtains the initial position coordinate point and the target position coordinate point of the construction vehicle, wherein both the initial position coordinate point and the target position coordinate point are located in the standby area of the construction vehicle. ...
Embodiment 2
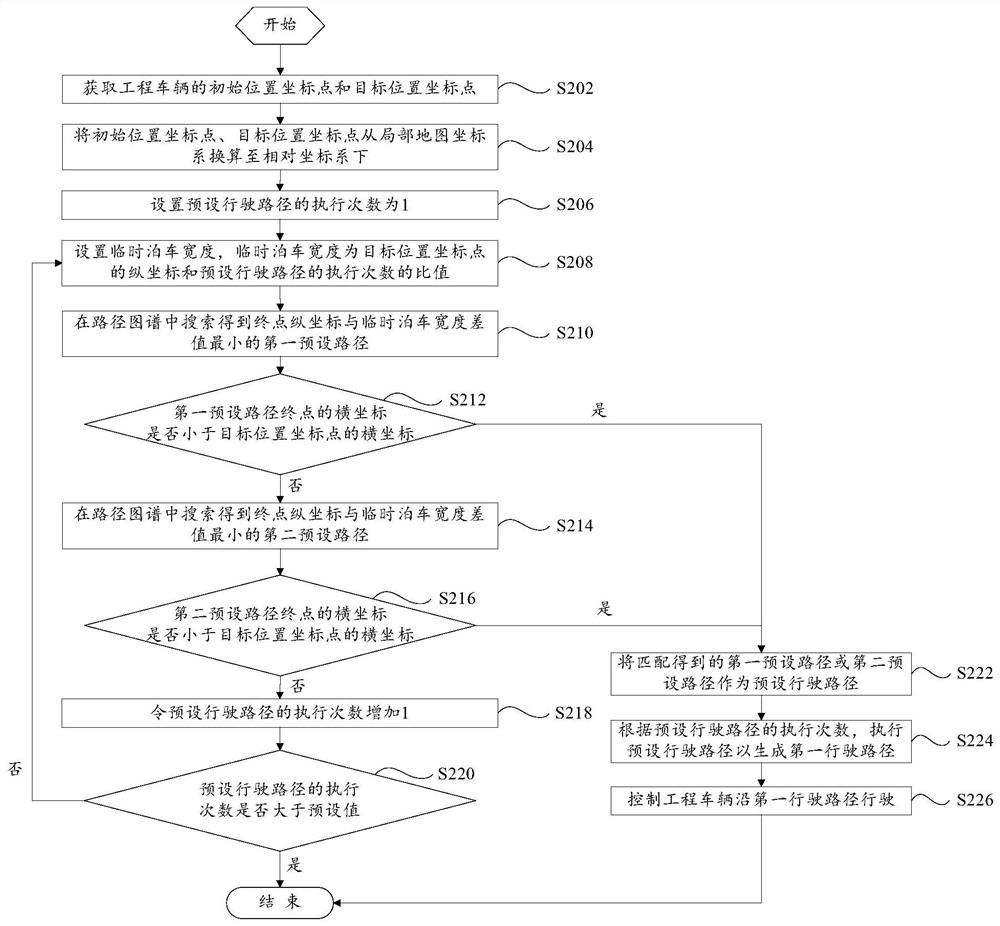
[0065] Such as figure 2 As shown, in one embodiment of the present invention, a kind of control method of engineering vehicle parallel position is provided, comprising:
[0066] S202, acquiring the initial position coordinate point and the target position coordinate point of the engineering vehicle;
[0067] S204, converting the initial position coordinate point and the target position coordinate point from the local map coordinate system to the relative coordinate system;
[0068] S206, setting the execution times of the preset driving route to 1;
[0069] S208, setting the temporary parking width, the temporary parking width is the ratio of the ordinate of the coordinate point of the target position to the execution times of the preset driving path;
[0070] S210, searching the route map to obtain the first preset route with the smallest difference between the ordinate of the end point and the temporary parking width;
[0071] S212, judging whether the abscissa of the en...
Embodiment 3
[0090] In any of the above embodiments, further, as Figure 9 As shown, the first preset path includes: a first curved path and a second curved path.
[0091] Among them, such as Figure 9As shown, the second curved path is connected to the first curved path, and the first curved path and the second curved path are symmetrical about the center of the connection, so as to ensure that the tangents at the starting point and end point of the first preset path are parallel, thereby ensuring The orientation of the construction vehicle at the coordinate point of the initial position is consistent with the orientation at the end position of the first preset path, so as to successfully complete the parallel positioning. Such as Figure 5 As shown, the angle turned by the first curved path is greater than 0 degrees and less than or equal to 90 degrees, so that there are multiple first preset paths with different end coordinates corresponding to different corners in the path map. In va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More