

Walking aid equipment based on position error characteristic, and walking aid method thereof
An auxiliary equipment and error technology, applied in the direction of claw arms, manipulators, program-controlled manipulators, etc., can solve problems such as poor user experience and poor force sense of the power-assisted exoskeleton system, and achieve the effect of avoiding power mismatch and fast and effective matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
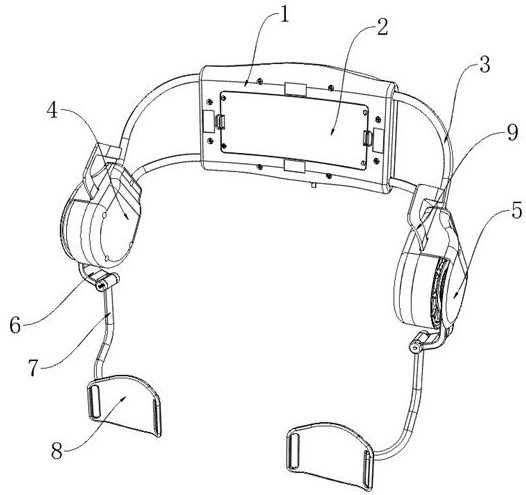
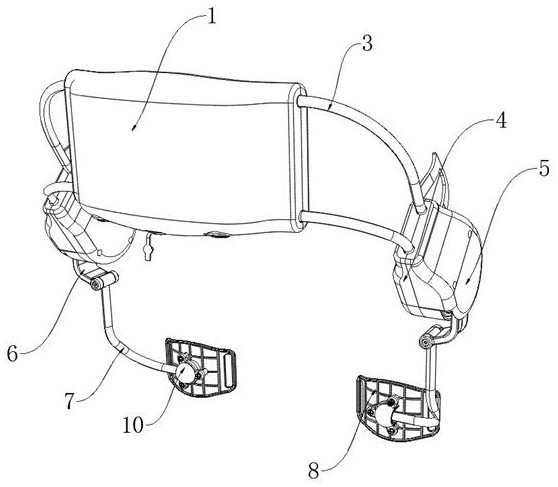
[0044] see Figure 1-4 As shown, the present invention is a walking aid device based on position error features, including a backpack main body 1, the inner side of the backpack main body 1 is equipped with a sealing cover 2 for fixing the power module, and both ends of the backpack main body 1 are fixed with connecting columns 3. The end of the connecting column 3 away from the main body 1 of the backpack is fixed with a motor housing 4, the top of the motor housing 4 is fixed with a support frame 9, and one end of the support frame 9 is connected to the connecting column 3, and the inside of the motor housing 4 is fixed with a rotor motor 11;
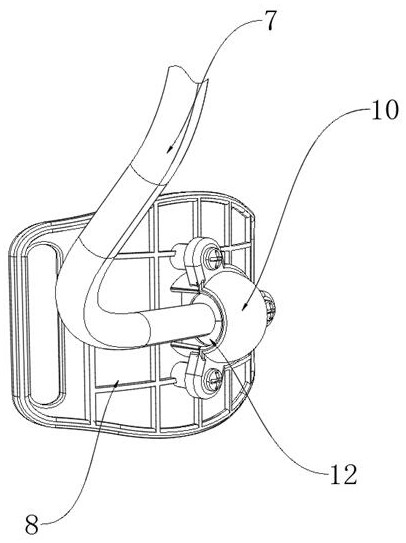
[0045] A power module is fixed inside the backpack main body 1. The power module is electrically connected to the rotor motor 11. The output end of the rotor motor 11 is connected to the L-shaped first swing arm 6 through a spline. The motor is placed at one end of the shell 4 and is located at the first The outer side of the swing a...
Embodiment 2
[0055] On the basis of the above-mentioned embodiment 1, the walking aid method of the device is disclosed:
[0056] First, analyze the characteristics of the human body when walking;
[0057] Such as Figure 5 As shown, let the vertical downward dotted line be the zero point reference line. With the zero point line as a reference, the swinging leg towards the front is marked as a positive value, and the swinging leg towards the back is marked as a negative value.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More