

A five-degree-of-freedom time-sharing drive power-assisted manipulator with mechanical locking function
A time-sharing driving and mechanical locking technology, applied in manipulators, claw arms, manufacturing tools, etc., can solve the problem of less time-sharing driving of joint power sources, and achieve the effects of high-precision control, weight reduction, and burden reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
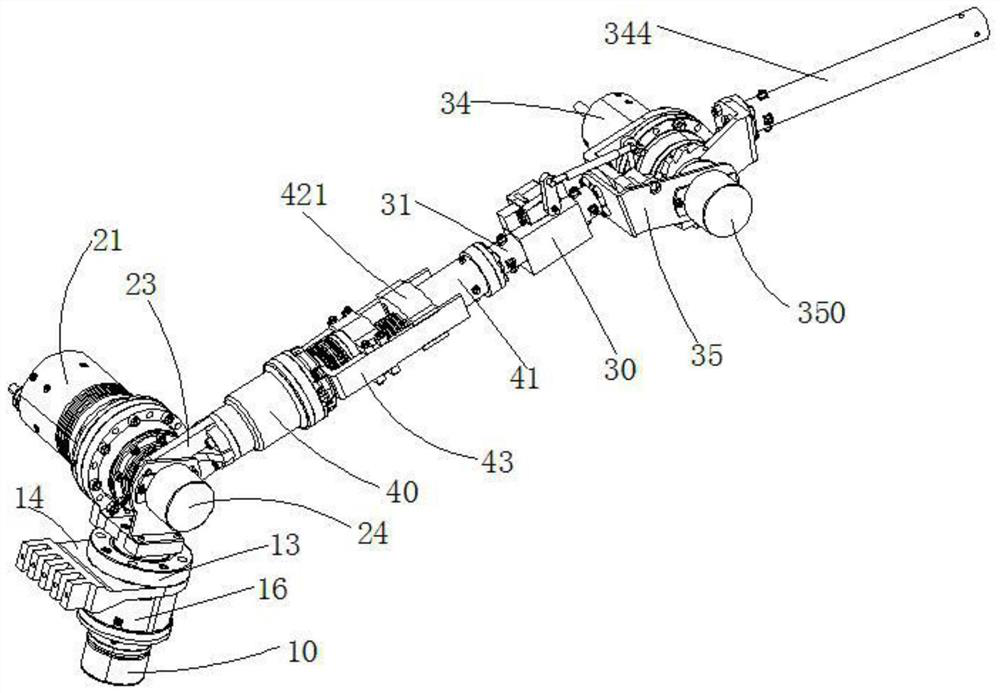
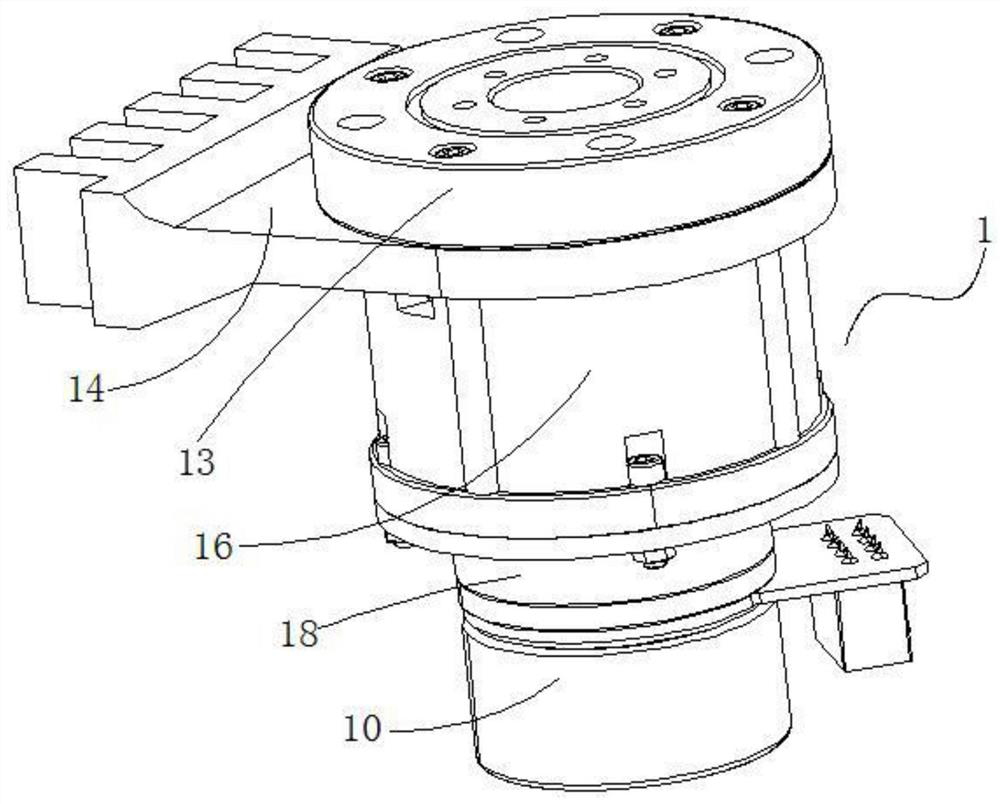
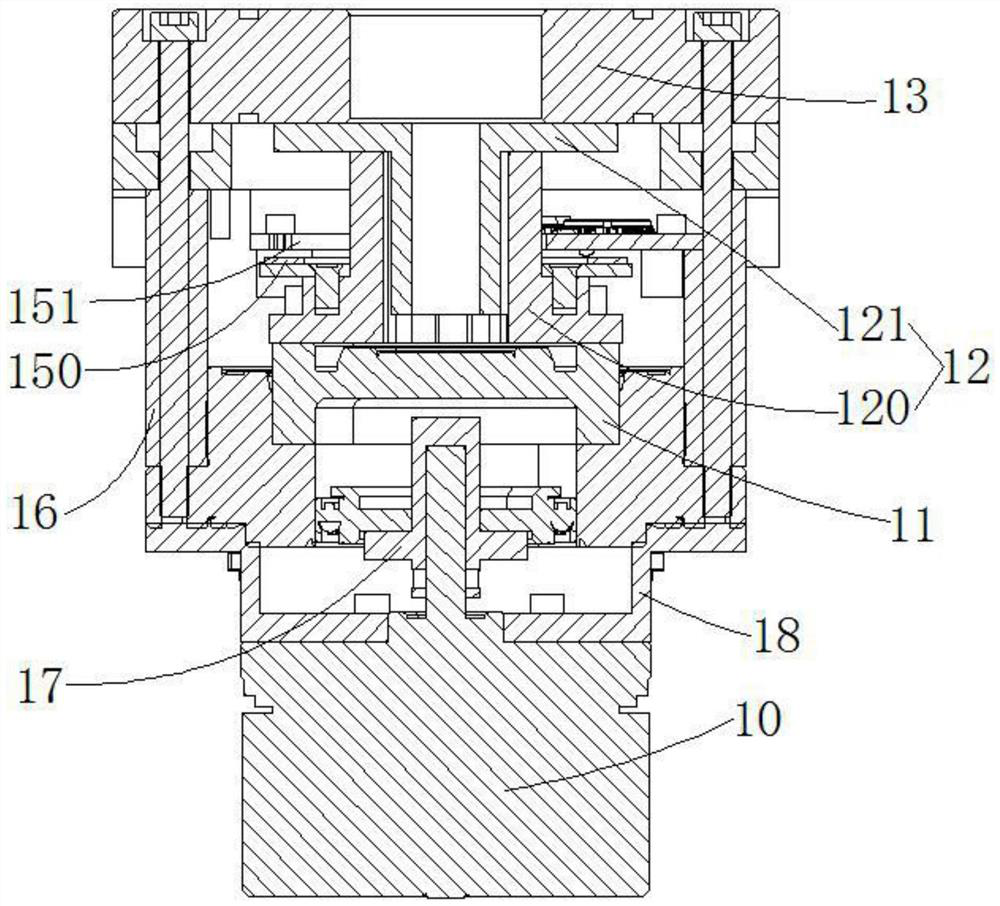
[0039] Such as Figure 1-17 As shown, a five-degree-of-freedom time-sharing driving power-assisted mechanical arm with a mechanical locking function includes joint one 1, joint two 2, joint three 3 and a central time-sharing drive mechanism 4, and the joint one 1 includes a joint-servo motor 10. Joint-reducer 11 and joint-cross roller bearing 13, the output shaft of the joint-servo motor 10 is connected to the input end of the joint-reducer 11, and the output end of the joint-reducer 11 is connected to the joint-cross The inner ring of the roller bearing 13, the joint-reducer 11 is a harmonic reducer, and the output shaft of the joint-servo motor 10 is connected to the input end of the joint-reducer 11 through the joint-coupling 17 (that is, the joint An elliptical wheel of a reducer 11), the output end of the joint-reducer 11 is connected to the inner ring of the joint-crossed roller bearing 13 through the transmission flange 12. The output shaft of the joint-servo motor 10 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More