

Swarm robot dynamic encirclement control method and system based on gene regulation and control network
A gene regulation network, swarm robot technology, applied in control/regulation systems, non-electric variable control, two-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The concept, specific structure and technical effects of the present application will be clearly and completely described below in conjunction with the embodiments and drawings, so as to fully understand the purpose, scheme and effect of the present application. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
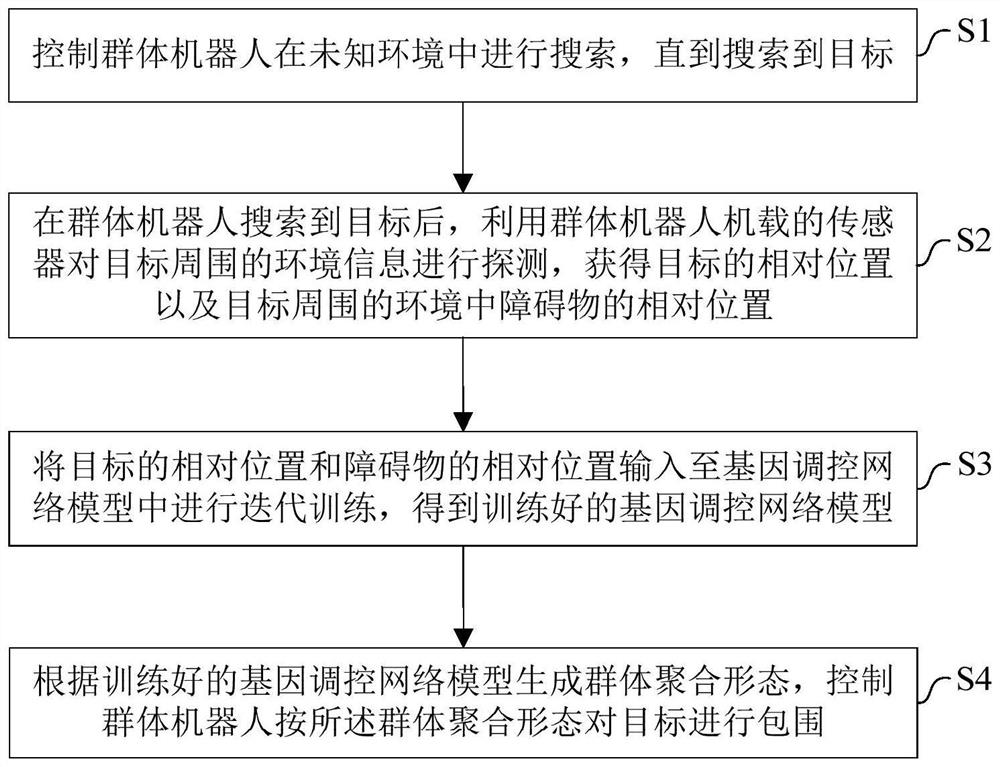
[0032] refer to figure 1 ,Such as figure 1 Shown is a method for dynamic round-up control of group robots based on gene regulation network provided by the embodiment of the present application. The method includes the following steps:
[0033] Step S1, control the swarm robot to search in an unknown environment until the target is found;
[0034] Specifically, the swarm robots walk randomly in an unknown environment. When any robot finds the target, the robot will interact with the swarm robots in real time with the information of the searched ta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More