

Robust control method based on reinforcement learning and Lyapunov function
A technology of reinforcement learning and robust control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of low safety and stability, to ensure free exploration, high efficiency and safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
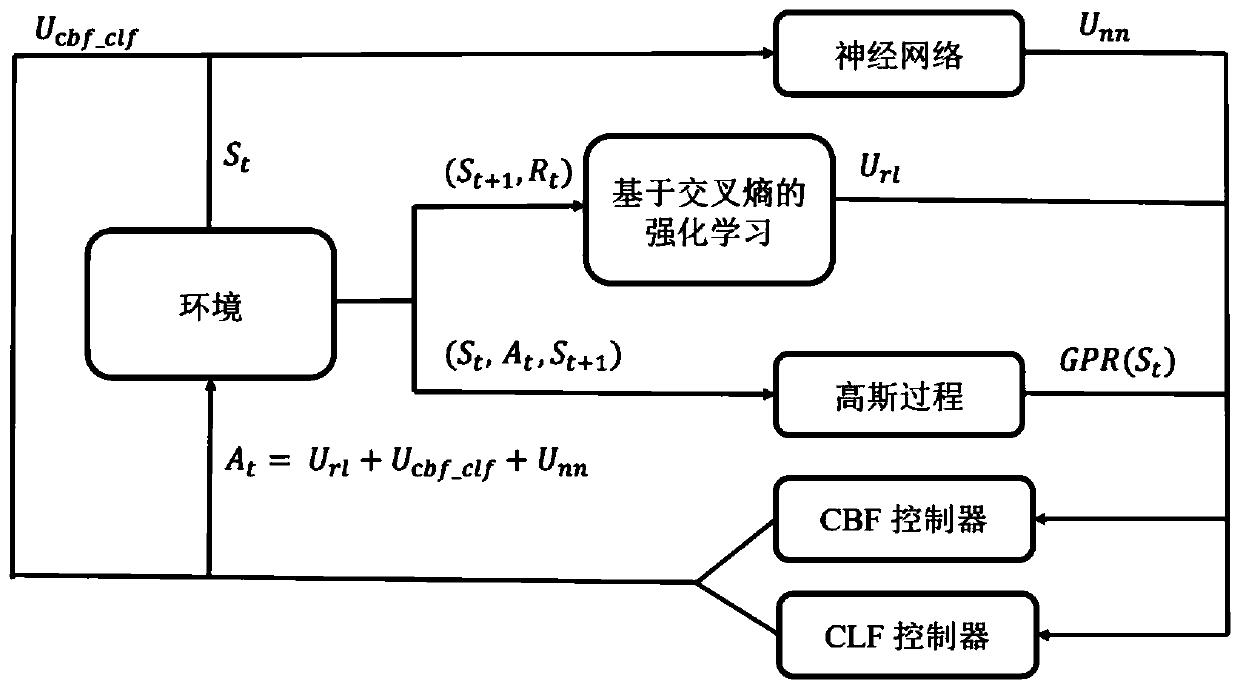
[0038] like figure 1 Shown is an embodiment of a robust control method based on reinforcement learning and Lyapunov functions, including the following steps:
[0039] Step 1: Build an affine system model, and then model the uncertainty in the system dynamics model based on the Gaussian process; the nonlinear affine system can be modeled as: Among them, f(s)+g(s)a represents the prior model obtained by modeling system dynamics and kinematics, and d(s) represents the deviation between the model and the real environment; Gaussian process regression obtains the state s through Bayesian inference * The lower deviation d(s * ) mean and variance:
[0040]
[0041]
[0042] Among them, k(s i ,s j ) is the kernel function defined in GP, k n =[k(s 1 ,s * ), k(s 2 ,s * ),...,k(s n ,s * )], [K] i,j =k(s i ,s j ) is the kernel matrix, is the label vector, σ noise is the standard deviation of label data noise, I is the identity matrix;
[0043] Get a high confiden...
Embodiment 2
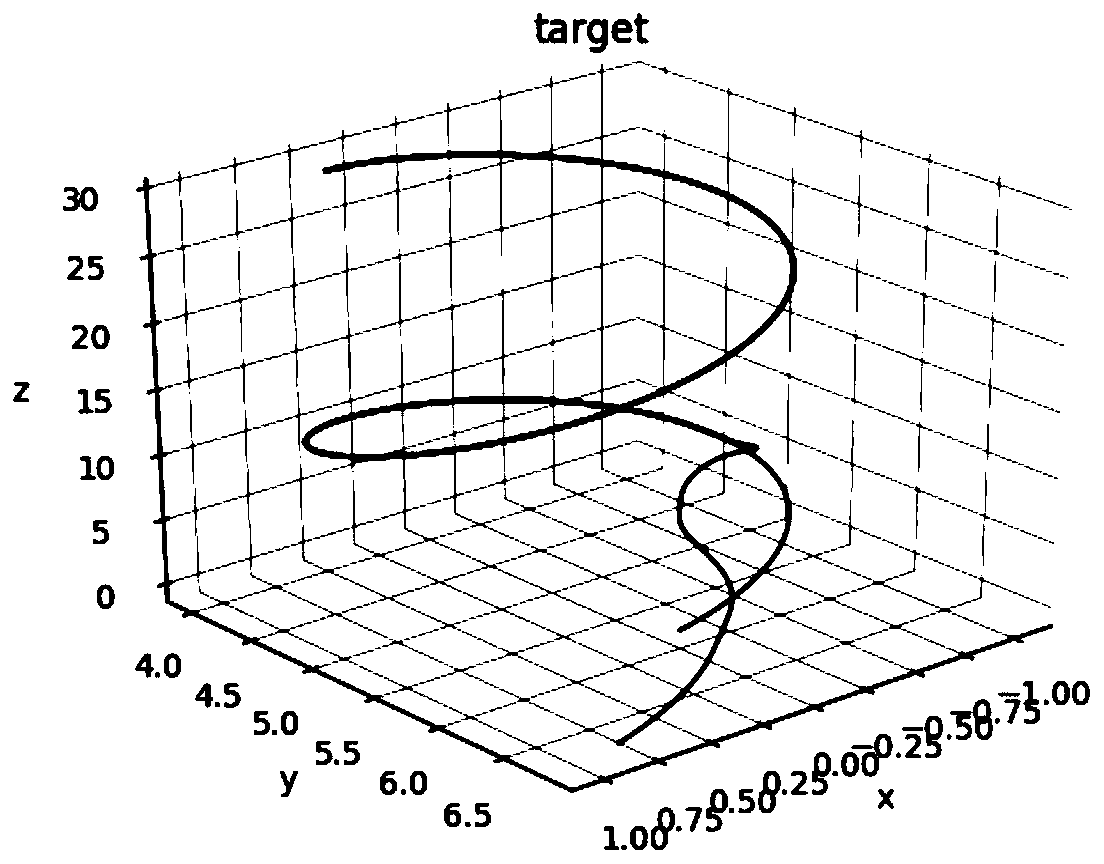
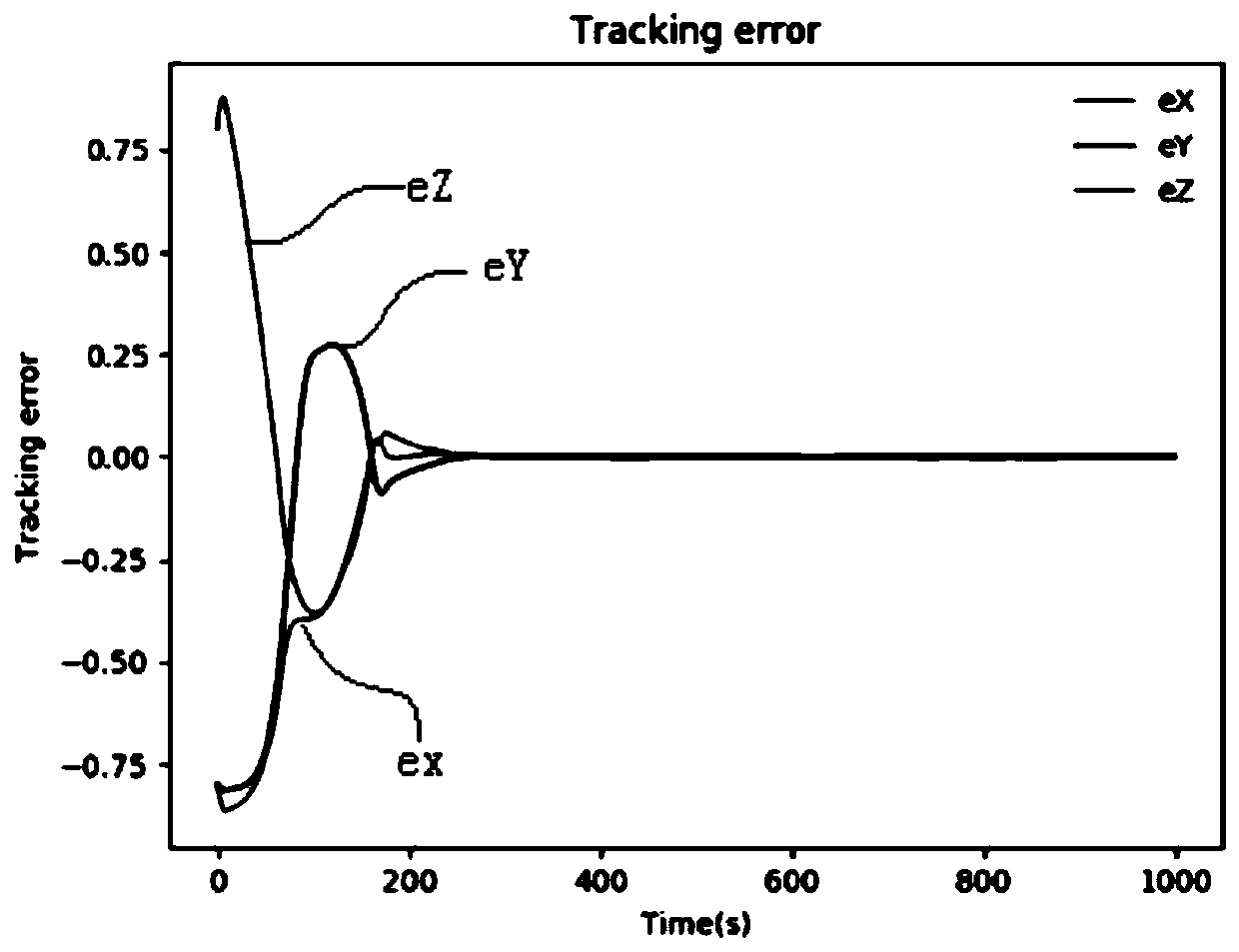
[0060] like Figure 1-3 As shown, on the basis of Embodiment 1, this embodiment takes the trajectory tracking and obstacle avoidance tasks of a quadrotor UAV under random wind field interference as an example to illustrate the specific implementation steps of this method:
[0061] Step 1: In this example, based on the prior knowledge of robot dynamics and the actual task scene, a baseline nonlinear affine system model is established, and a parameterized trajectory in three-dimensional space is set, including the trajectory start point and end point, which is recorded as r(t) ∈ R 3 .
[0062] Define the safe state space of the UAV according to the task scenario: C={x|h(x)≥0} and the target balance point, such as: avoiding obstacles, the trajectory point as the balance point, and designing the corresponding control barrier function (CBF )h(s t ) and the Lyapunov function (CLF) V(s t ).
[0063] Step 2: Select the framework of model predictive control as the benchmark strate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More