

Space robot arresting control system, reinforce learning method and dynamics modeling method
A space robot and control system technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of not considering the non-cooperative characteristics of the target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
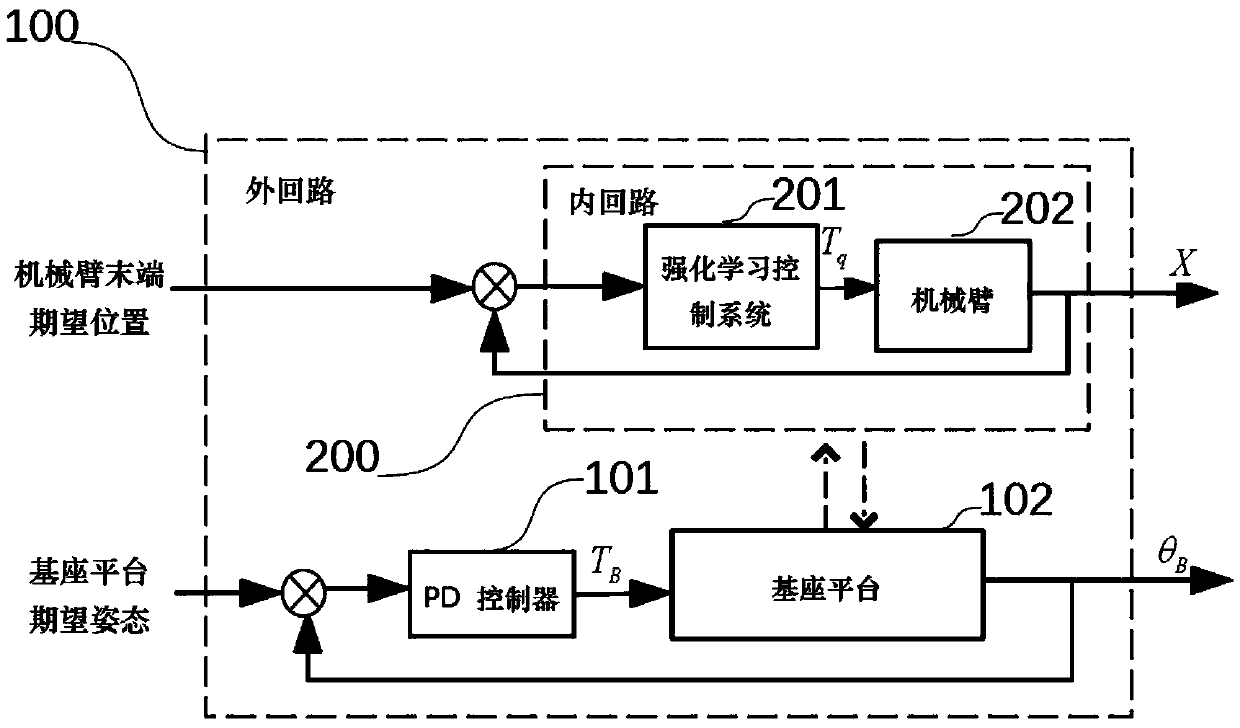
[0068] Such as figure 1 As shown, a space robot manipulator capture control system, the control system includes inner and outer two loops; in the outer loop 100, the system realizes the space robot manipulator base platform 102 in the capture process through the PD controller 101 The posture is stable; in the inner loop 200, the system controls the mechanical arm 202 through the reinforcement learning control system 201 based on reinforcement learning to realize the capture maneuver for non-cooperative targets.
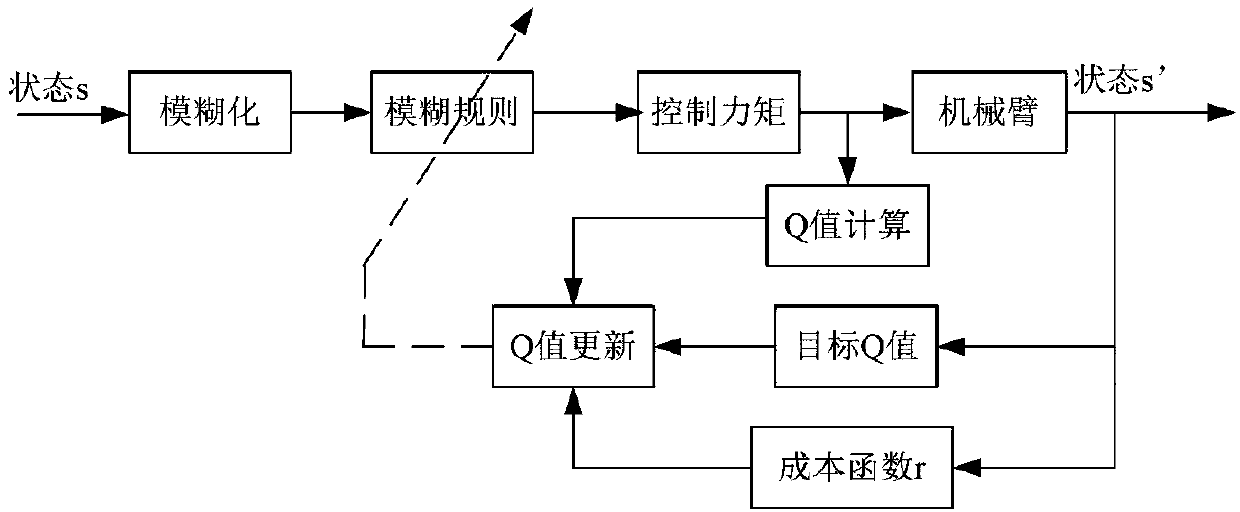
[0069] Such as figure 2 As shown, a reinforcement learning method for the reinforcement learning control system of the mechanical arm in the inner loop of the above-mentioned mechanical arm capture control system, by using the end position of the mechanical arm as the position of the operator, the error of the end position of the mechanical arm E c , speed error As the input of the motion controller, the control torque T of the space manipulator is output by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More