

Coq-based verification method for time sequence safety of robot control system
A technology of control system and verification method, applied in the field of system verification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention.
[0027] Rather, the present invention encompasses any alternative, modifications, equivalents, and programs that are defined by the claims in the essence and range of the present invention. Further, in order to make the public a better understanding of the present invention, some specific detail portions are described in detail in the detailed description of the invention. The description of these detail portions can also be fully understood in the art.
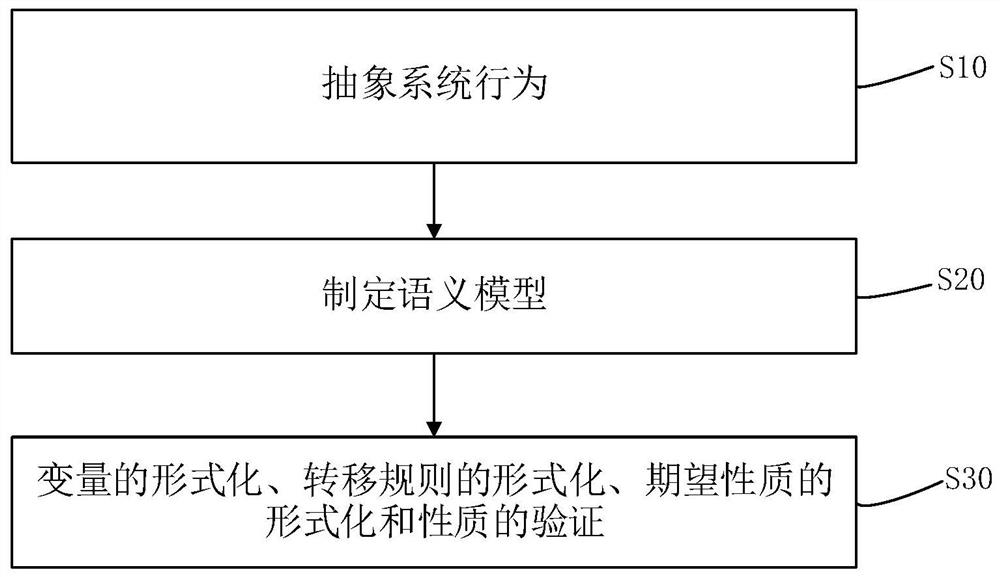
[0028] See figure 1 The technical solution of the present invention is a step of verifying the verification method of the COQ-based robot control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More